 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOperation and Imitation under Safety-Aware Shared Control
Paper and Code
May 26, 2019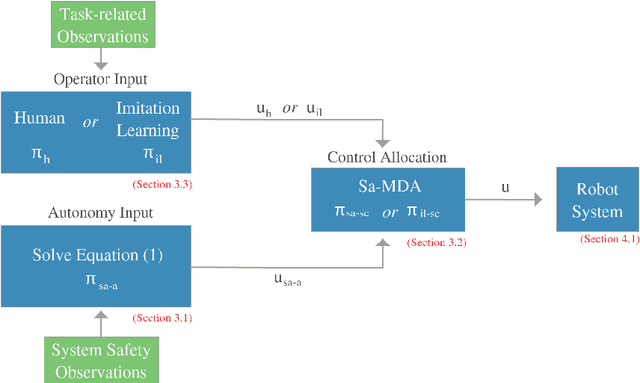



We describe a shared control methodology that can, without knowledge of the task, be used to improve a human's control of a dynamic system, be used as a training mechanism, and be used in conjunction with Imitation Learning to generate autonomous policies that recreate novel behaviors. Our algorithm introduces autonomy that assists the human partner by enforcing safety and stability constraints. The autonomous agent has no a priori knowledge of the desired task and therefore only adds control information when there is concern for the safety of the system. We evaluate the efficacy of our approach with a human subjects study consisting of 20 participants. We find that our shared control algorithm significantly improves the rate at which users are able to successfully execute novel behaviors. Experimental results suggest that the benefits of our safety-aware shared control algorithm also extend to the human partner's understanding of the system and their control skill. Finally, we demonstrate how a combination of our safety-aware shared control algorithm and Imitation Learning can be used to autonomously recreate the demonstrated behaviors.