 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpening the Black Box of Deep Neural Networks via Information
Paper and Code
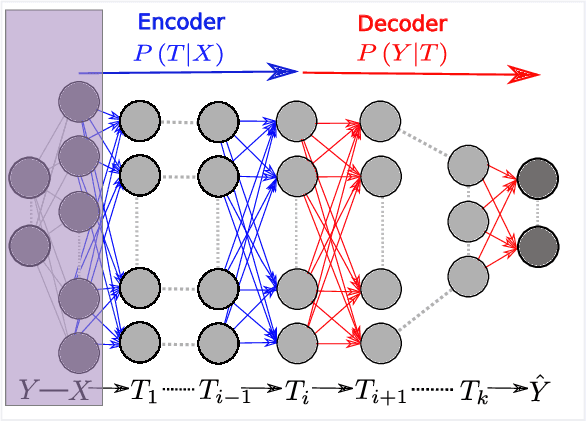
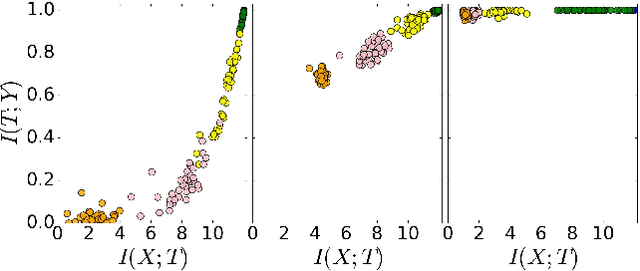
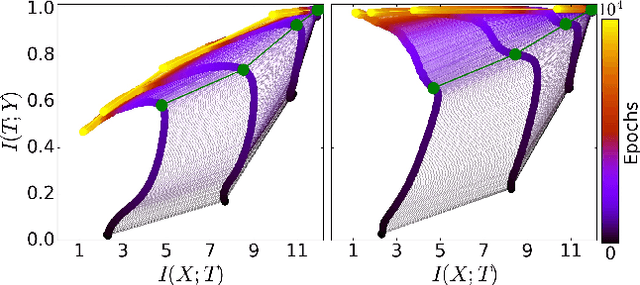
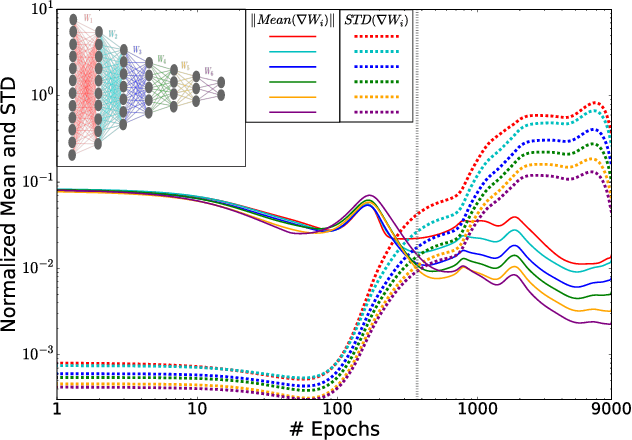
Despite their great success, there is still no comprehensive theoretical understanding of learning with Deep Neural Networks (DNNs) or their inner organization. Previous work proposed to analyze DNNs in the \textit{Information Plane}; i.e., the plane of the Mutual Information values that each layer preserves on the input and output variables. They suggested that the goal of the network is to optimize the Information Bottleneck (IB) tradeoff between compression and prediction, successively, for each layer. In this work we follow up on this idea and demonstrate the effectiveness of the Information-Plane visualization of DNNs. Our main results are: (i) most of the training epochs in standard DL are spent on {\emph compression} of the input to efficient representation and not on fitting the training labels. (ii) The representation compression phase begins when the training errors becomes small and the Stochastic Gradient Decent (SGD) epochs change from a fast drift to smaller training error into a stochastic relaxation, or random diffusion, constrained by the training error value. (iii) The converged layers lie on or very close to the Information Bottleneck (IB) theoretical bound, and the maps from the input to any hidden layer and from this hidden layer to the output satisfy the IB self-consistent equations. This generalization through noise mechanism is unique to Deep Neural Networks and absent in one layer networks. (iv) The training time is dramatically reduced when adding more hidden layers. Thus the main advantage of the hidden layers is computational. This can be explained by the reduced relaxation time, as this it scales super-linearly (exponentially for simple diffusion) with the information compression from the previous layer.