Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-source High-precision Autonomous Suturing Framework With Visual Guidance
Paper and Code
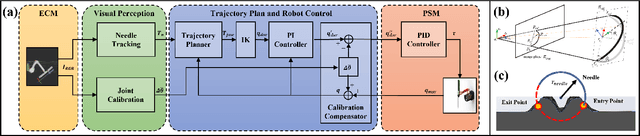
Autonomous surgery has attracted increasing attention for revolutionizing robotic patient care, yet remains a distant and challenging goal. In this paper, we propose an image-based framework for high-precision autonomous suturing operation. We first build an algebraic geometric algorithm to achieve accurate needle pose estimation, then design the corresponding keypoint-based calibration network for joint-offset compensation, and further plan and control suture trajectory. Our solution ranked first among all competitors in the AccelNet Surgical Robotics Challenge. The source code is opened here to accelerate future autonomous surgery research.
View paper on