 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Submodular Coordination with Bounded Tracking Regret: Theory, Algorithm, and Applications to Multi-Robot Coordination
Paper and Code
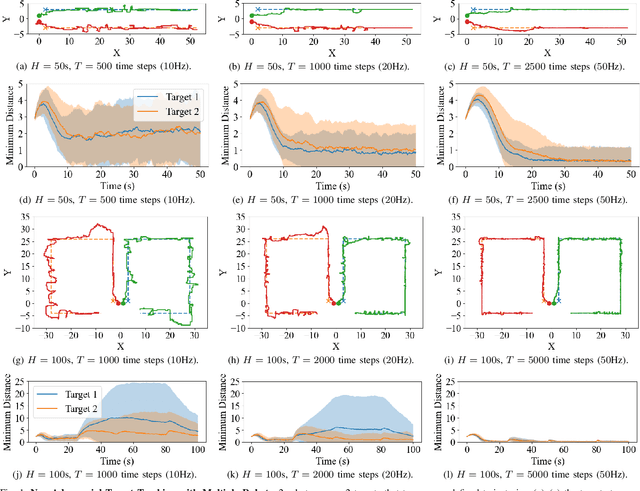
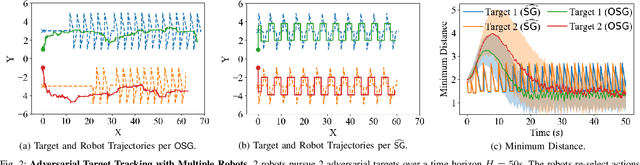
We enable efficient and effective coordination in unpredictable environments, ie., in environments whose future evolution is unknown a priori and even adversarial. We are motivated by the future of autonomy that involves multiple robots coordinating in dynamic, unstructured, and adversarial environments to complete complex tasks such as target tracking, image covering, and area monitoring. Such tasks are often modeled as submodular maximization coordination problems. We thus introduce the first submodular coordination algorithm with bounded tracking regret, ie., with bounded suboptimality with respect to optimal time-varying actions that know the future a priori. The bound gracefully degrades with the environments' capacity to change adversarially. It also quantifies how often the robots must re-select actions to "learn" to coordinate as if they knew the future a priori. Our algorithm generalizes the seminal Sequential Greedy algorithm by Fisher et al. to unpredictable environments, leveraging submodularity and algorithms for the problem of tracking the best expert. We validate our algorithm in simulated scenarios of target tracking.