 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Segmentation of LiDAR Sequences: Dataset and Algorithm
Paper and Code
Jun 16, 2022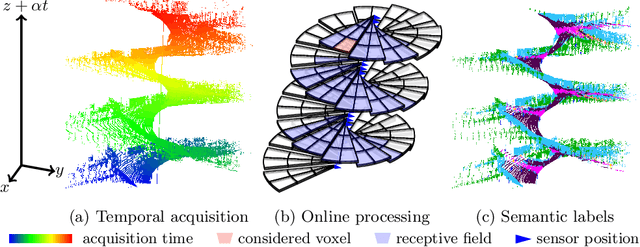
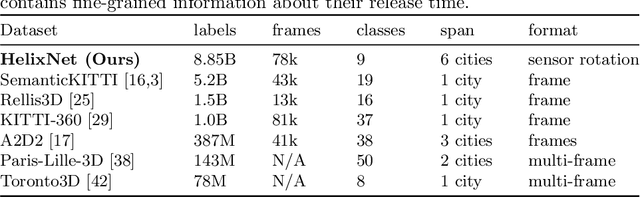
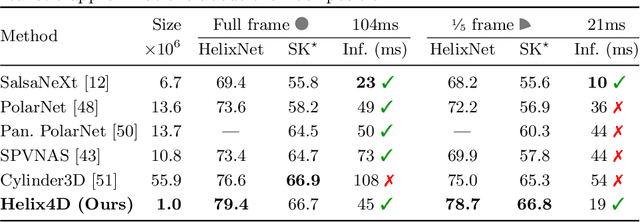
Roof-mounted spinning LiDAR sensors are widely used by autonomous vehicles, driving the need for real-time processing of 3D point sequences. However, most LiDAR semantic segmentation datasets and algorithms split these acquisitions into $360^\circ$ frames, leading to acquisition latency that is incompatible with realistic real-time applications and evaluations. We address this issue with two key contributions. First, we introduce HelixNet, a $10$ billion point dataset with fine-grained labels, timestamps, and sensor rotation information that allows an accurate assessment of real-time readiness of segmentation algorithms. Second, we propose Helix4D, a compact and efficient spatio-temporal transformer architecture specifically designed for rotating LiDAR point sequences. Helix4D operates on acquisition slices that correspond to a fraction of a full rotation of the sensor, significantly reducing the total latency. We present an extensive benchmark of the performance and real-time readiness of several state-of-the-art models on HelixNet and SemanticKITTI. Helix4D reaches accuracy on par with the best segmentation algorithms with a reduction of more than $5\times$ in terms of latency and $50\times$ in model size. Code and data are available at: https://romainloiseau.fr/helixnet