 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline One-Dimensional Magnetic Field SLAM with Loop-Closure Detection
Paper and Code
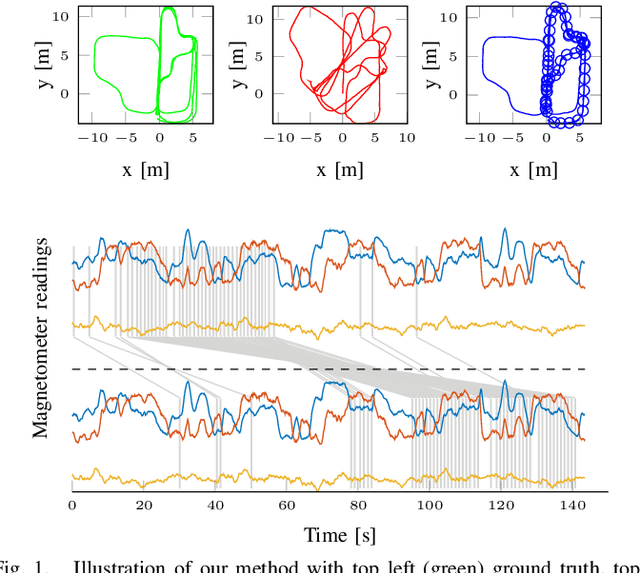
We present a lightweight magnetic field simultaneous localisation and mapping (SLAM) approach for drift correction in odometry paths, where the interest is purely in the odometry and not in map building. We represent the past magnetic field readings as a one-dimensional trajectory against which the current magnetic field observations are matched. This approach boils down to sequential loop-closure detection and decision-making, based on the current pose state estimate and the magnetic field. We combine this setup with a path estimation framework using an extended Kalman smoother which fuses the odometry increments with the detected loop-closure timings. We demonstrate the practical applicability of the model with several different real-world examples from a handheld iPad moving in indoor scenes.