 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline learning of both state and dynamics using ensemble Kalman filters
Paper and Code
Jun 06, 2020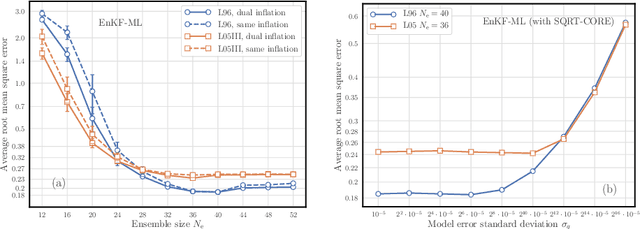
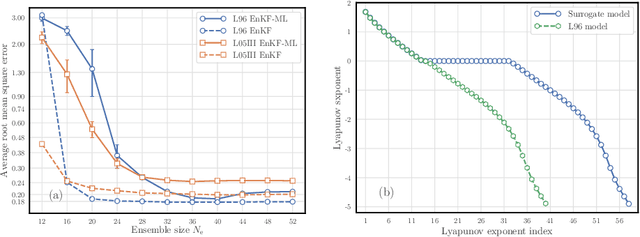
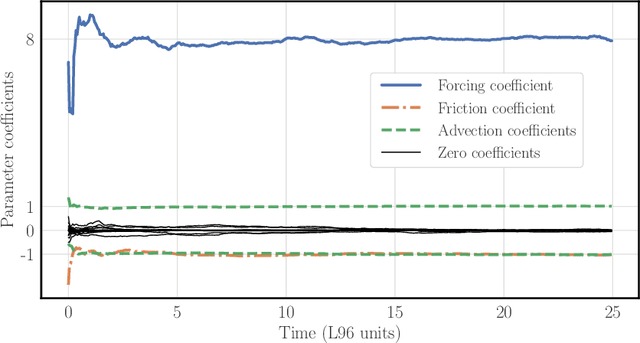
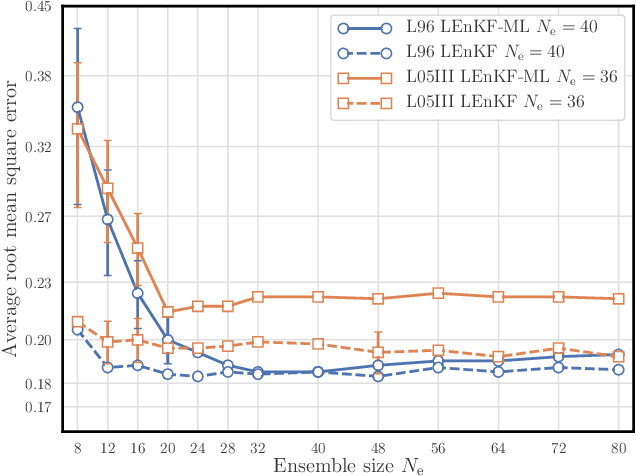
The reconstruction of the dynamics of an observed physical system as a surrogate model has been brought to the fore by recent advances in machine learning. To deal with partial and noisy observations in that endeavor, machine learning representations of the surrogate model can be used within a Bayesian data assimilation framework. However, these approaches require to consider long time series of observational data, meant to be assimilated all together. This paper investigates the possibility to learn both the dynamics and the state online, i.e. to update their estimates at any time, in particular when new observations are acquired. The estimation is based on the ensemble Kalman filter (EnKF) family of algorithms using a rather simple representation for the surrogate model and state augmentation. We consider the implication of learning dynamics online through (i) a global EnKF, (i) a local EnKF and (iii) an iterative EnKF and we discuss in each case issues and algorithmic solutions. We then demonstrate numerically the efficiency and assess the accuracy of these methods using one-dimensional, one-scale and two-scale chaotic Lorenz models.