 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Active Perception for Partially Observable Markov Decision Processes with Limited Budget
Paper and Code


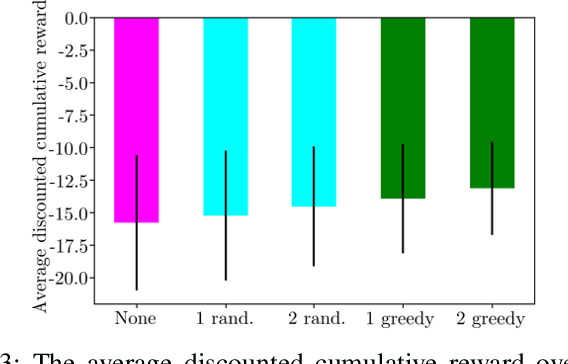
Active perception strategies enable an agent to selectively gather information in a way to improve its performance. In applications in which the agent does not have prior knowledge about the available information sources, it is crucial to synthesize active perception strategies at runtime. We consider a setting in which at runtime an agent is capable of gathering information under a limited budget. We pose the problem in the context of partially observable Markov decision processes. We propose a generalized greedy strategy that selects a subset of information sources with near-optimality guarantees on uncertainty reduction. Our theoretical analysis establishes that the proposed active perception strategy achieves near-optimal performance in terms of expected cumulative reward. We demonstrate the resulting strategies in simulations on a robotic navigation problem.