 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnboard Flight Control of a Small Quadrotor Using Single Strapdown Optical Flow Sensor
Paper and Code
Mar 27, 2012
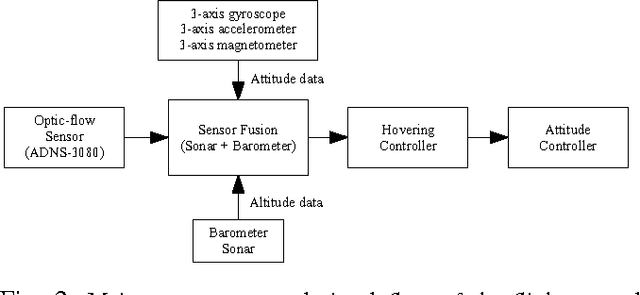

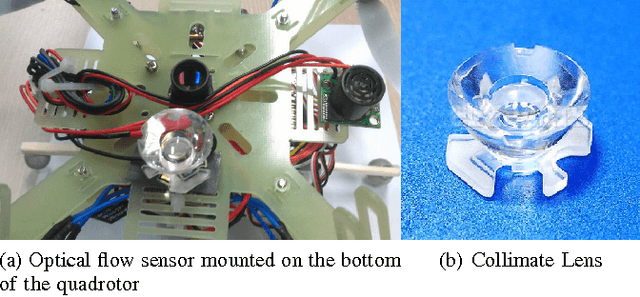
This paper considers onboard control of a small-sized quadrotor using a strapdown embedded optical flow sensor which is conventionally used for desktop mice. The vehicle considered in this paper can carry only few dozen grams of payload, therefore conventional camera-based optical flow methods are not applicable. We present hovering control of the small-sized quadrotor using a single-chip optical flow sensor, implemented on an 8-bit microprocessor without external sensors or communication with a ground control station. Detailed description of all the system components is provided along with evaluation of the accuracy. Experimental results from flight tests are validated with the ground-truth data provided by a high-accuracy reference system.