Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Use of the Observability Gramian for Partially Observed Robotic Path Planning Problems
Paper and Code
Jan 30, 2018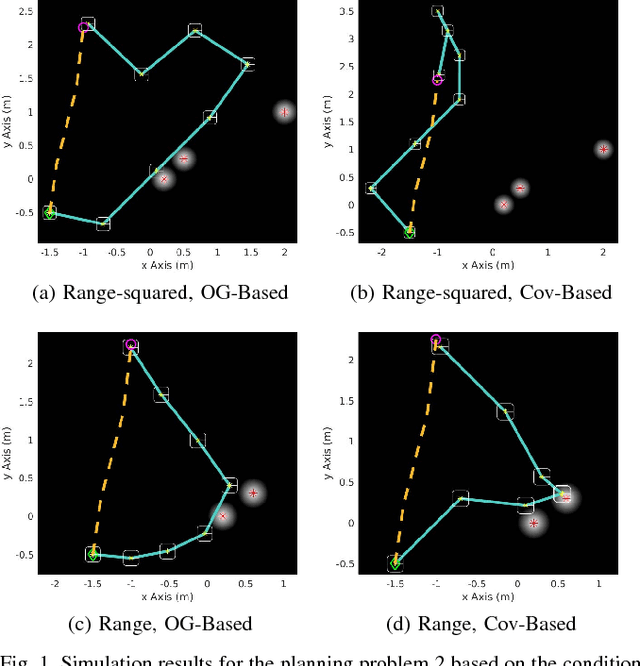
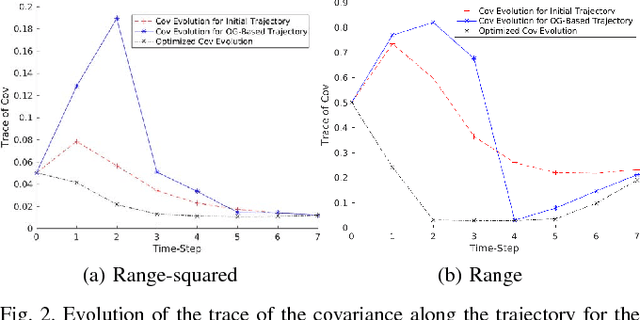
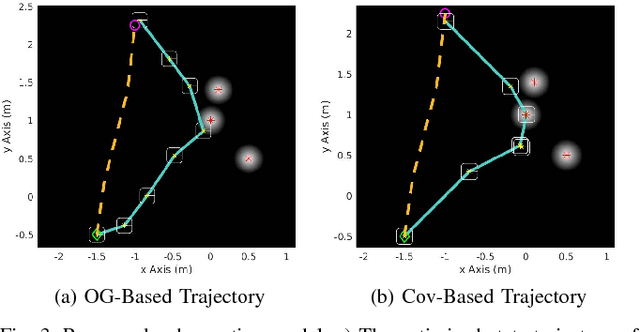
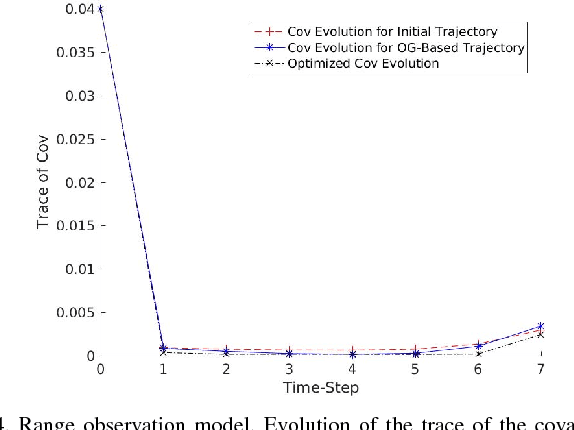
Optimizing measures of the observability Gramian as a surrogate for the estimation performance may provide irrelevant or misleading trajectories for planning under observation uncertainty.
* 2017 IEEE 56th Annual Conference on Decision and Control (CDC) * 6 pages, 9 figures. CDC 2017
View paper on