 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Simple Reactive Neural Networks for Behaviour-Based Reinforcement Learning
Paper and Code
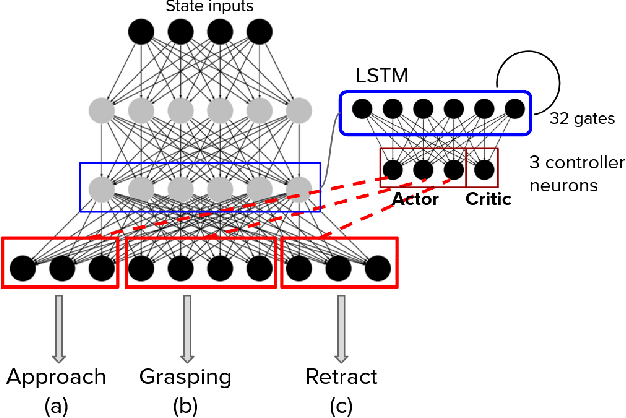
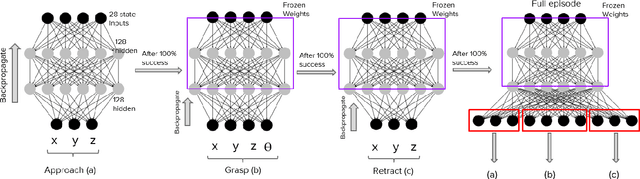
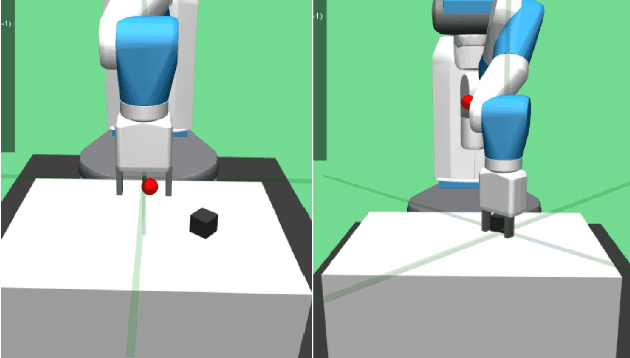
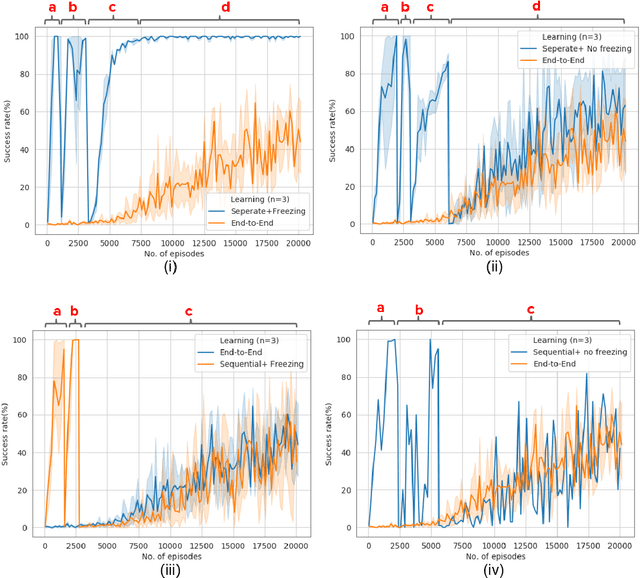
We present a behaviour-based reinforcement learning approach, inspired by Brook's subsumption architecture, in which simple fully connected networks are trained as reactive behaviours. Our working assumption is that a pick and place robotic task can be simplified by leveraging domain knowledge of a robotics developer to decompose and train such reactive behaviours; namely, approach, grasp, and retract. Then the robot autonomously learns how to combine them via an Actor-Critic architecture. The Actor-Critic policy is to determine the activation and inhibition mechanisms of the reactive behaviours in a particular temporal sequence. We validate our approach in a simulated robot environment where the task is picking a block and taking it to a target position while orienting the gripper from a top grasp. The latter represents an extra degree-of-freedom of which current end-to-end reinforcement learning fail to generalise. Our findings suggest that robotic learning can be more effective if each behaviour is learnt in isolation and then combined them to accomplish the task. That is, our approach learns the pick and place task in 8,000 episodes, which represents a drastic reduction in the number of training episodes required by an end-to-end approach and the existing state-of-the-art algorithms.