 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Plug-and-Play Regularization using Linear Denoisers
Paper and Code


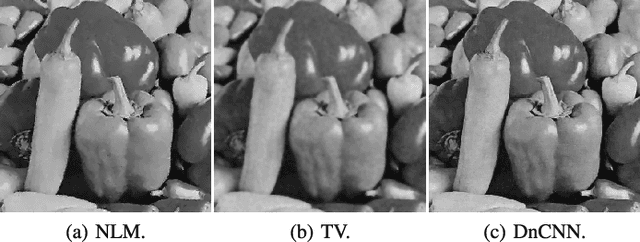

In plug-and-play (PnP) regularization, the knowledge of the forward model is combined with a powerful denoiser to obtain state-of-the-art image reconstructions. This is typically done by taking a proximal algorithm such as FISTA or ADMM, and formally replacing the proximal map associated with a regularizer by nonlocal means, BM3D or a CNN denoiser. Each iterate of the resulting PnP algorithm involves some kind of inversion of the forward model followed by denoiser-induced regularization. A natural question in this regard is that of optimality, namely, do the PnP iterations minimize some f+g, where f is a loss function associated with the forward model and g is a regularizer? This has a straightforward solution if the denoiser can be expressed as a proximal map, as was shown to be the case for a class of linear symmetric denoisers. However, this result excludes kernel denoisers such as nonlocal means that are inherently non-symmetric. In this paper, we prove that a broader class of linear denoisers (including symmetric denoisers and kernel denoisers) can be expressed as a proximal map of some convex regularizer g. An algorithmic implication of this result for non-symmetric denoisers is that it necessitates appropriate modifications in the PnP updates to ensure convergence to a minimum of f+g. Apart from the convergence guarantee, the modified PnP algorithms are shown to produce good restorations.