 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-board Deep-learning-based Unmanned Aerial Vehicle Fault Cause Detection and Identification
Paper and Code
Apr 03, 2020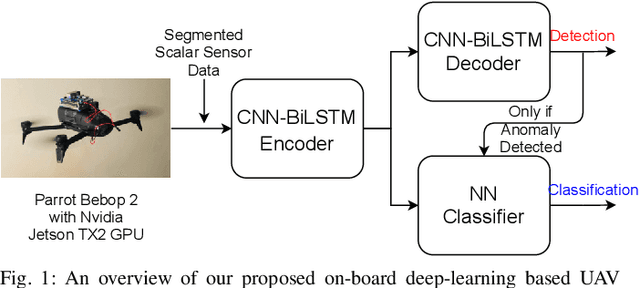
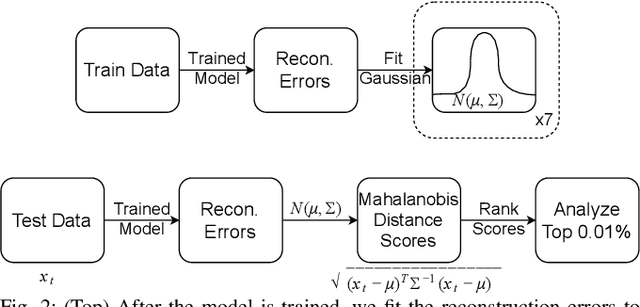
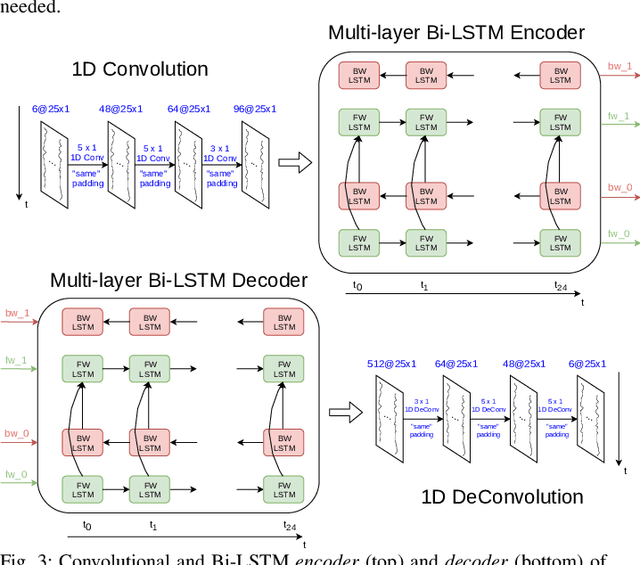

With the increase in use of Unmanned Aerial Vehicles (UAVs)/drones, it is important to detect and identify causes of failure in real time for proper recovery from a potential crash-like scenario or post incident forensics analysis. The cause of crash could be either a fault in the sensor/actuator system, a physical damage/attack, or a cyber attack on the drone's software. In this paper, we propose novel architectures based on deep Convolutional and Long Short-Term Memory Neural Networks (CNNs and LSTMs) to detect (via Autoencoder) and classify drone mis-operations based on sensor data. The proposed architectures are able to learn high-level features automatically from the raw sensor data and learn the spatial and temporal dynamics in the sensor data. We validate the proposed deep-learning architectures via simulations and experiments on a real drone. Empirical results show that our solution is able to detect with over 90% accuracy and classify various types of drone mis-operations (with about 99% accuracy (simulation data) and upto 88% accuracy (experimental data)).