 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOff-Policy Policy Gradient Algorithms by Constraining the State Distribution Shift
Paper and Code
Dec 01, 2019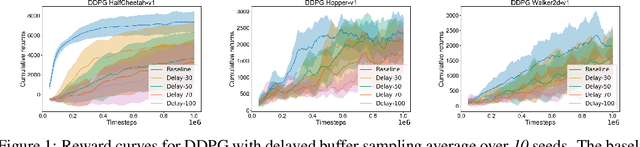
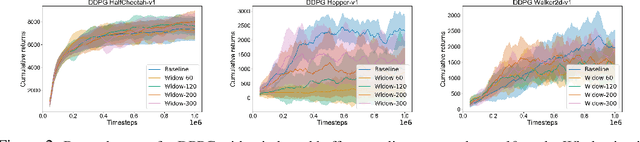
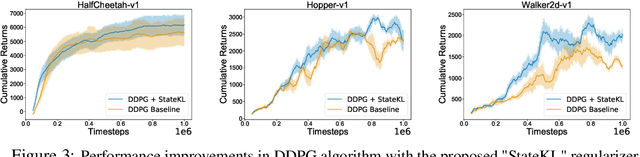
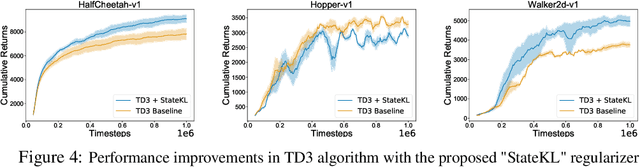
Off-policy deep reinforcement learning (RL) algorithms are incapable of learning solely from batch offline data without online interactions with the environment, due to the phenomenon known as \textit{extrapolation error}. This is often due to past data available in the replay buffer that may be quite different from the data distribution under the current policy. We argue that most off-policy learning methods fundamentally suffer from a \textit{state distribution shift} due to the mismatch between the state visitation distribution of the data collected by the behavior and target policies. This data distribution shift between current and past samples can significantly impact the performance of most modern off-policy based policy optimization algorithms. In this work, we first do a systematic analysis of state distribution mismatch in off-policy learning, and then develop a novel off-policy policy optimization method to constraint the state distribution shift. To do this, we first estimate the state distribution based on features of the state, using a density estimator and then develop a novel constrained off-policy gradient objective that minimizes the state distribution shift. Our experimental results on continuous control tasks show that minimizing this distribution mismatch can significantly improve performance in most popular practical off-policy policy gradient algorithms.