 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOff-policy Multi-step Q-learning
Paper and Code
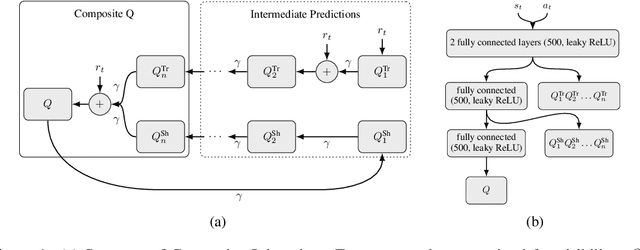

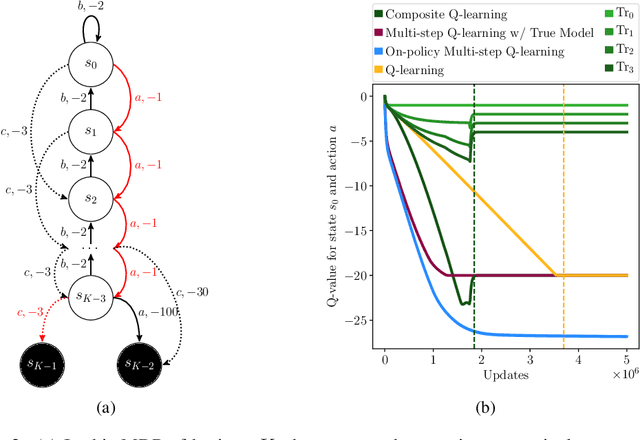

In the past few years, off-policy reinforcement learning methods have shown promising results in their application for robot control. Deep Q-learning, however, still suffers from poor data-efficiency which is limiting with regard to real-world applications. We follow the idea of multi-step TD-learning to enhance data-efficiency while remaining off-policy by proposing two novel Temporal-Difference formulations: (1) Truncated Q-functions which represent the return for the first n steps of a policy rollout and (2) Shifted Q-functions, acting as the farsighted return after this truncated rollout. We prove that the combination of these short- and long-term predictions is a representation of the full return, leading to the Composite Q-learning algorithm. We show the efficacy of Composite Q-learning in the tabular case and compare our approach in the function-approximation setting with TD3, Model-based Value Expansion and TD3(Delta), which we introduce as an off-policy variant of TD(Delta). We show on three simulated robot tasks that Composite TD3 outperforms TD3 as well as state-of-the-art off-policy multi-step approaches in terms of data-efficiency.