 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObjects Matter: Learning Object Relation Graph for Robust Camera Relocalization
Paper and Code
May 26, 2022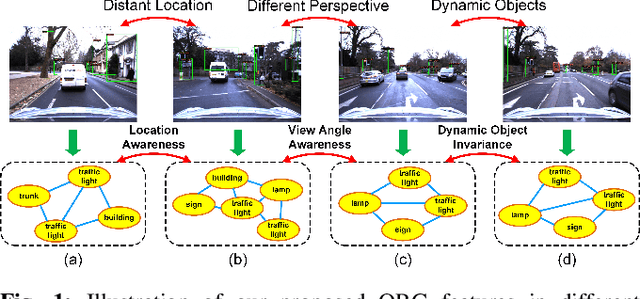
Visual relocalization aims to estimate the pose of a camera from one or more images. In recent years deep learning based pose regression methods have attracted many attentions. They feature predicting the absolute poses without relying on any prior built maps or stored images, making the relocalization very efficient. However, robust relocalization under environments with complex appearance changes and real dynamics remains very challenging. In this paper, we propose to enhance the distinctiveness of the image features by extracting the deep relationship among objects. In particular, we extract objects in the image and construct a deep object relation graph (ORG) to incorporate the semantic connections and relative spatial clues of the objects. We integrate our ORG module into several popular pose regression models. Extensive experiments on various public indoor and outdoor datasets demonstrate that our method improves the performance significantly and outperforms the previous approaches.