 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObjectFolder: A Dataset of Objects with Implicit Visual, Auditory, and Tactile Representations
Paper and Code
Sep 18, 2021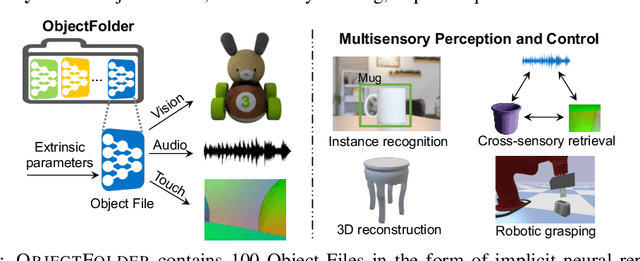
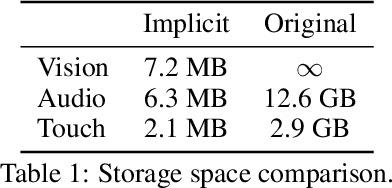

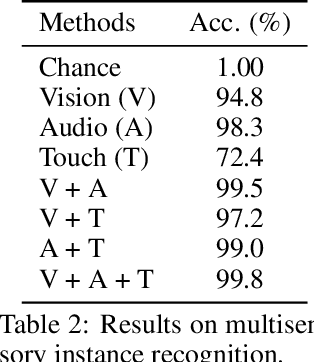
Multisensory object-centric perception, reasoning, and interaction have been a key research topic in recent years. However, the progress in these directions is limited by the small set of objects available -- synthetic objects are not realistic enough and are mostly centered around geometry, while real object datasets such as YCB are often practically challenging and unstable to acquire due to international shipping, inventory, and financial cost. We present ObjectFolder, a dataset of 100 virtualized objects that addresses both challenges with two key innovations. First, ObjectFolder encodes the visual, auditory, and tactile sensory data for all objects, enabling a number of multisensory object recognition tasks, beyond existing datasets that focus purely on object geometry. Second, ObjectFolder employs a uniform, object-centric, and implicit representation for each object's visual textures, acoustic simulations, and tactile readings, making the dataset flexible to use and easy to share. We demonstrate the usefulness of our dataset as a testbed for multisensory perception and control by evaluating it on a variety of benchmark tasks, including instance recognition, cross-sensory retrieval, 3D reconstruction, and robotic grasping.