 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Tracking Using Spatio-Temporal Future Prediction
Paper and Code
Oct 15, 2020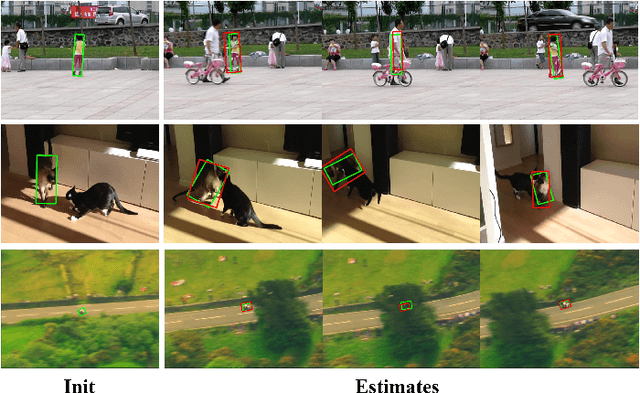

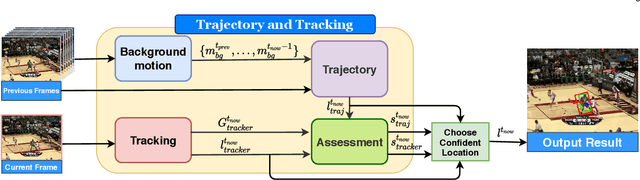
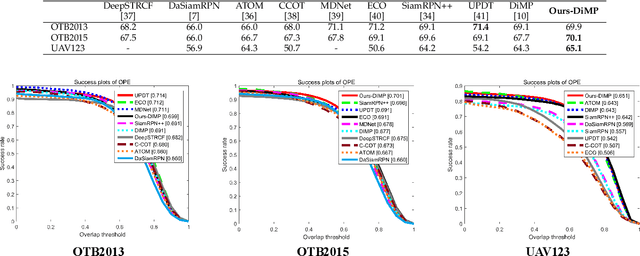
Occlusion is a long-standing problem that causes many modern tracking methods to be erroneous. In this paper, we address the occlusion problem by exploiting the current and future possible locations of the target object from its past trajectory. To achieve this, we introduce a learning-based tracking method that takes into account background motion modeling and trajectory prediction. Our trajectory prediction module predicts the target object's locations in the current and future frames based on the object's past trajectory. Since, in the input video, the target object's trajectory is not only affected by the object motion but also the camera motion, our background motion module estimates the camera motion. So that the object's trajectory can be made independent from it. To dynamically switch between the appearance-based tracker and the trajectory prediction, we employ a network that can assess how good a tracking prediction is, and we use the assessment scores to choose between the appearance-based tracker's prediction and the trajectory-based prediction. Comprehensive evaluations show that the proposed method sets a new state-of-the-art performance on commonly used tracking benchmarks.