 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Tracking through Residual and Dense LSTMs
Paper and Code
Jun 22, 2020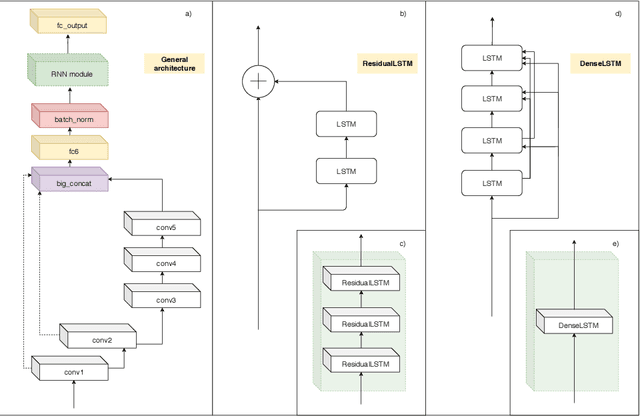

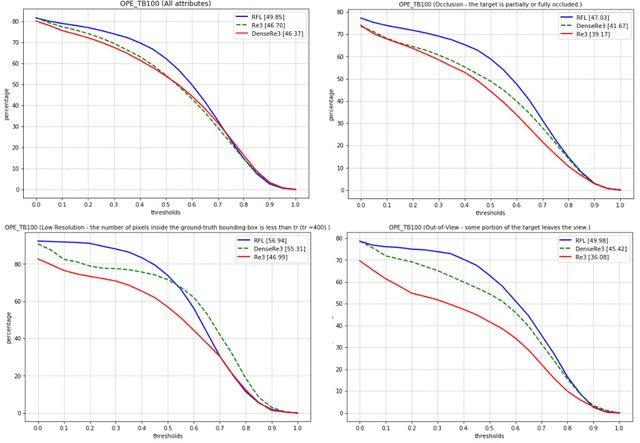
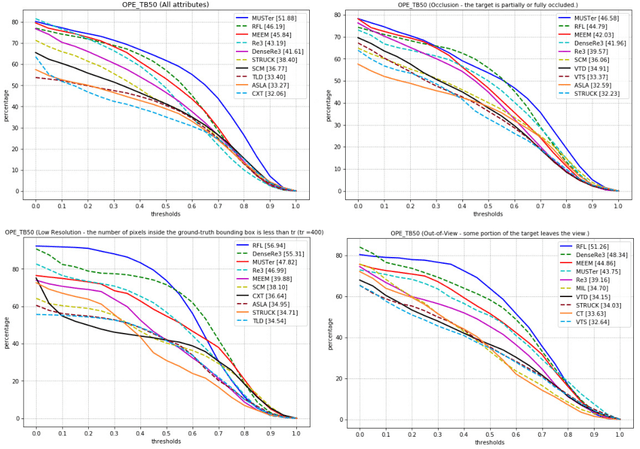
Visual object tracking task is constantly gaining importance in several fields of application as traffic monitoring, robotics, and surveillance, to name a few. Dealing with changes in the appearance of the tracked object is paramount to achieve high tracking accuracy, and is usually achieved by continually learning features. Recently, deep learning-based trackers based on LSTMs (Long Short-Term Memory) recurrent neural networks have emerged as a powerful alternative, bypassing the need to retrain the feature extraction in an online fashion. Inspired by the success of residual and dense networks in image recognition, we propose here to enhance the capabilities of hybrid trackers using residual and/or dense LSTMs. By introducing skip connections, it is possible to increase the depth of the architecture while ensuring a fast convergence. Experimental results on the Re3 tracker show that DenseLSTMs outperform Residual and regular LSTM, and offer a higher resilience to nuisances such as occlusions and out-of-view objects. Our case study supports the adoption of residual-based RNNs for enhancing the robustness of other trackers.