Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection for Autonomous Dozers
Paper and Code
Aug 17, 2022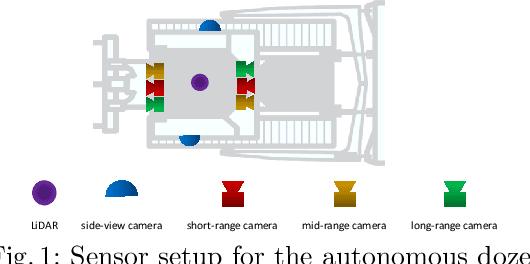

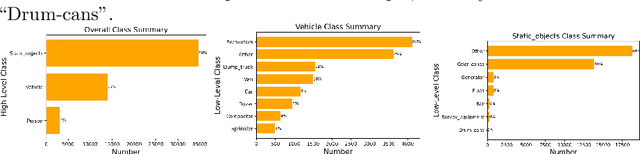
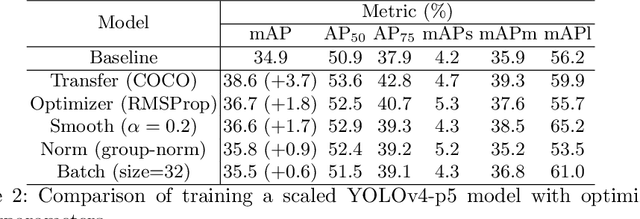
We introduce a new type of autonomous vehicle - an autonomous dozer that is expected to complete construction site tasks in an efficient, robust, and safe manner. To better handle the path planning for the dozer and ensure construction site safety, object detection plays one of the most critical components among perception tasks. In this work, we first collect the construction site data by driving around our dozers. Then we analyze the data thoroughly to understand its distribution. Finally, two well-known object detection models are trained, and their performances are benchmarked with a wide range of training strategies and hyperparameters.
View paper on