 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject as Distribution
Paper and Code
Jul 25, 2019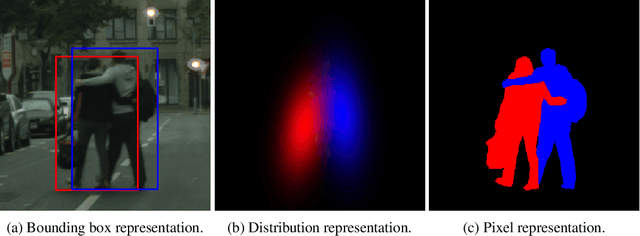
Object detection is a critical part of visual scene understanding. The representation of the object in the detection task has important implications on the efficiency and feasibility of annotation, robustness to occlusion, pose, lighting, and other visual sources of semantic uncertainty, and effectiveness in real-world applications (e.g., autonomous driving). Popular object representations include 2D and 3D bounding boxes, polygons, splines, pixels, and voxels. Each have their strengths and weakness. In this work, we propose a new representation of objects based on the bivariate normal distribution. This distribution-based representation has the benefit of robust detection of highly-overlapping objects and the potential for improved downstream tracking and instance segmentation tasks due to the statistical representation of object edges. We provide qualitative evaluation of this representation for the object detection task and quantitative evaluation of its use in a baseline algorithm for the instance segmentation task.