 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNPBG++: Accelerating Neural Point-Based Graphics
Paper and Code
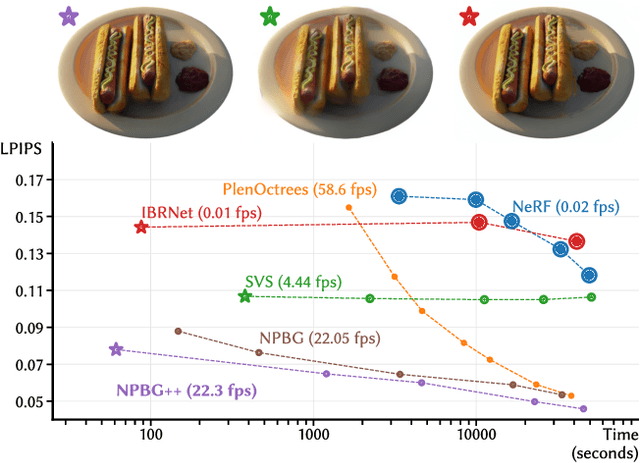
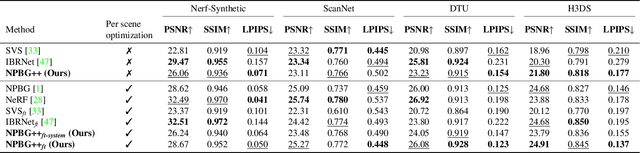
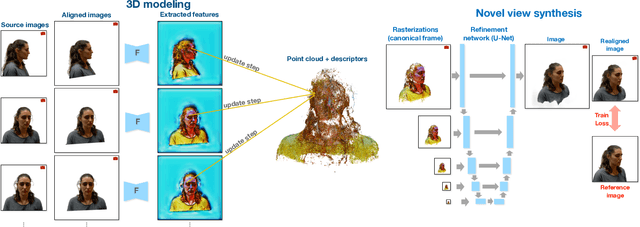
We present a new system (NPBG++) for the novel view synthesis (NVS) task that achieves high rendering realism with low scene fitting time. Our method efficiently leverages the multiview observations and the point cloud of a static scene to predict a neural descriptor for each point, improving upon the pipeline of Neural Point-Based Graphics in several important ways. By predicting the descriptors with a single pass through the source images, we lift the requirement of per-scene optimization while also making the neural descriptors view-dependent and more suitable for scenes with strong non-Lambertian effects. In our comparisons, the proposed system outperforms previous NVS approaches in terms of fitting and rendering runtimes while producing images of similar quality.