 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovel Co-variant Feature Point Matching Based on Gaussian Mixture Model
Paper and Code
Oct 26, 2019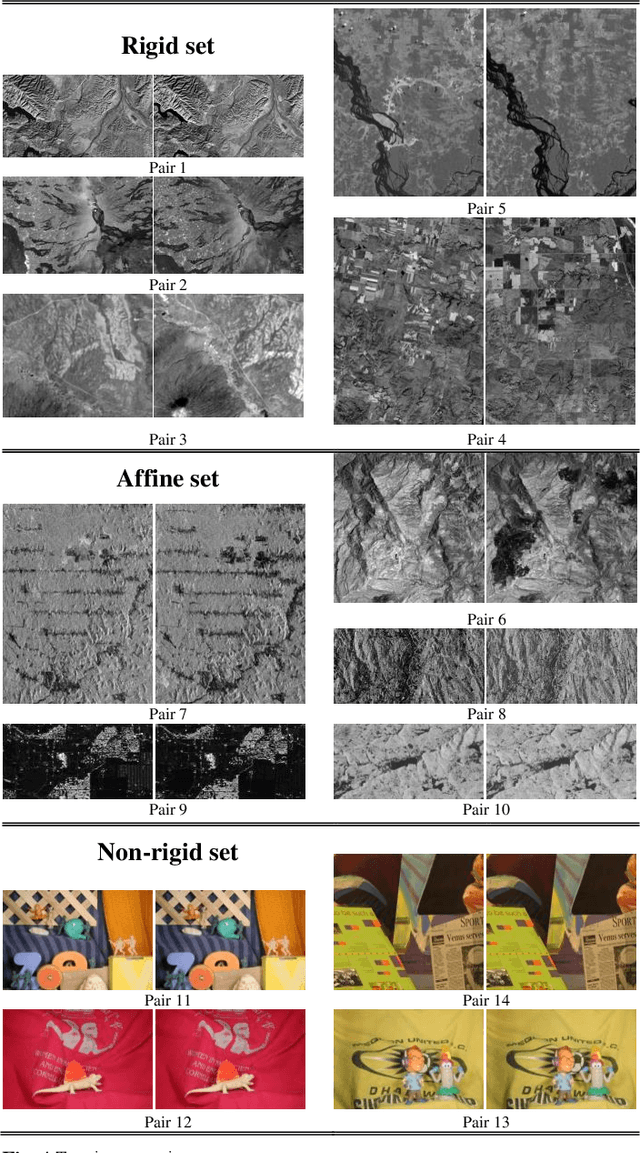
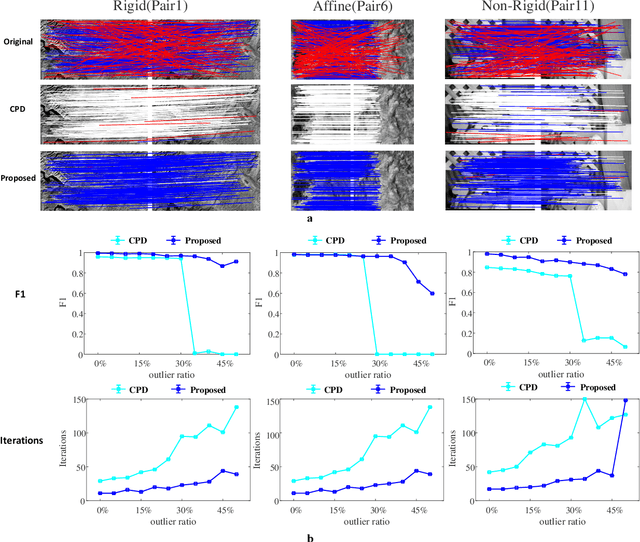
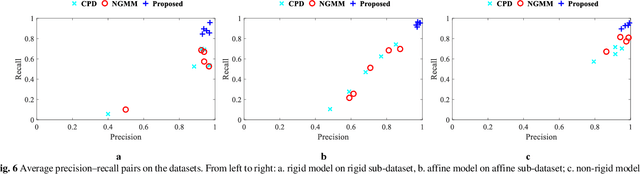
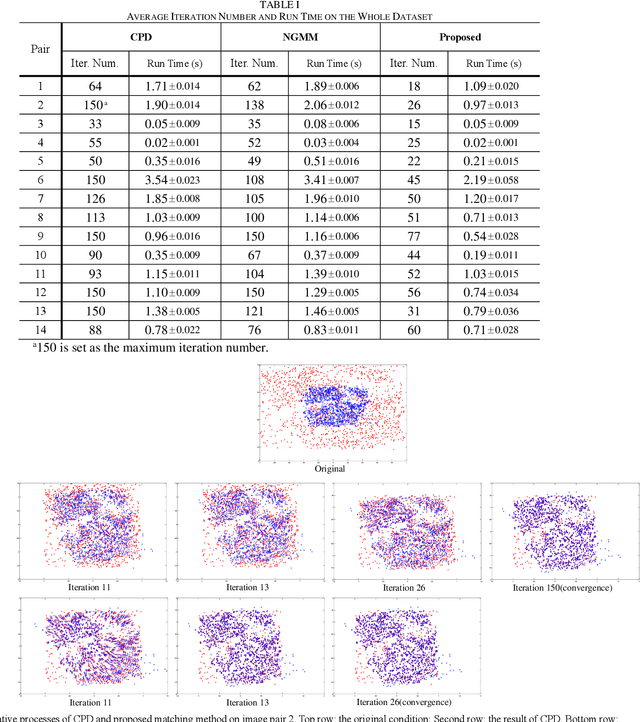
The feature frame is a key idea of feature matching problem between two images. However, most of the traditional matching methods only simply employ the spatial location information (the coordinates), which ignores the shape and orientation information of the local feature. Such additional information can be obtained along with coordinates using general co-variant detectors such as DOG, Hessian, Harris-Affine and MSER. In this paper, we develop a novel method considering all the feature center position coordinates, the local feature shape and orientation information based on Gaussian Mixture Model for co-variant feature matching. We proposed three sub-versions in our method for solving the matching problem in different conditions: rigid, affine and non-rigid, respectively, which all optimized by expectation maximization algorithm. Due to the effective utilization of the additional shape and orientation information, the proposed model can significantly improve the performance in terms of convergence speed and recall. Besides, it is more robust to the outliers.