 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonmyopic Distilled Data Association Belief Space Planning Under Budget Constraints
Paper and Code
Jul 17, 2022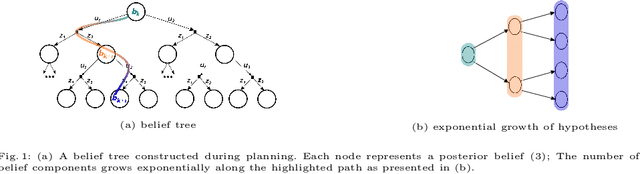

Autonomous agents operating in perceptually aliased environments should ideally be able to solve the data association problem. Yet, planning for future actions while considering this problem is not trivial. State of the art approaches therefore use multi-modal hypotheses to represent the states of the agent and of the environment. However, explicitly considering all possible data associations, the number of hypotheses grows exponentially with the planning horizon. As such, the corresponding Belief Space Planning problem quickly becomes unsolvable. Moreover, under hard computational budget constraints, some non-negligible hypotheses must eventually be pruned in both planning and inference. Nevertheless, the two processes are generally treated separately and the effect of budget constraints in one process over the other was barely studied. We present a computationally efficient method to solve the nonmyopic Belief Space Planning problem while reasoning about data association. Moreover, we rigorously analyze the effects of budget constraints in both inference and planning.