 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Filter for Simultaneous Localization and Mapping on a Matrix Lie Group using IMU and Feature Measurements
Paper and Code
Jan 05, 2021


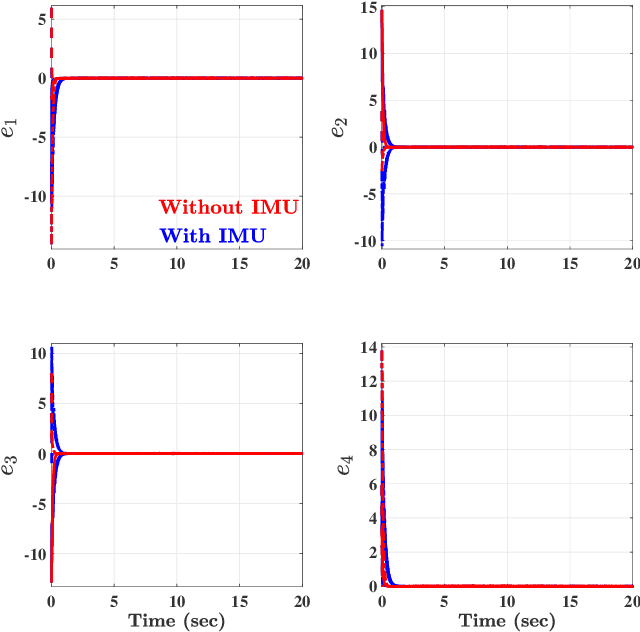
Simultaneous Localization and Mapping (SLAM) is a process of concurrent estimation of the vehicle's pose and feature locations with respect to a frame of reference. This paper proposes a computationally cheap geometric nonlinear SLAM filter algorithm structured to mimic the nonlinear motion dynamics of the true SLAM problem posed on the matrix Lie group of $\mathbb{SLAM}_{n}\left(3\right)$. The nonlinear filter on manifold is proposed in continuous form and it utilizes available measurements obtained from group velocity vectors, feature measurements and an inertial measurement unit (IMU). The unknown bias attached to velocity measurements is successfully handled by the proposed estimator. Simulation results illustrate the robustness of the proposed filter in discrete form demonstrating its utility for the six-degrees-of-freedom (6 DoF) pose estimation as well as feature estimation in three-dimensional (3D) space. In addition, the quaternion representation of the nonlinear filter for SLAM is provided. Keywords: Simultaneous Localization and Mapping, Nonlinear observer algorithm for SLAM, inertial measurement unit, inertial vision system, pose, position, attitude, landmark, estimation, IMU, SE(3), SO(3), unmanned aerial vehicle, rigid-body, noise, nonlinear observer for SLAM, Gaussian filter, Kalman filtering, navigation.