 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-invasive Cognitive-level Human Interfacing for the Robotic Restoration of Reaching & Grasping
Paper and Code
Feb 25, 2021
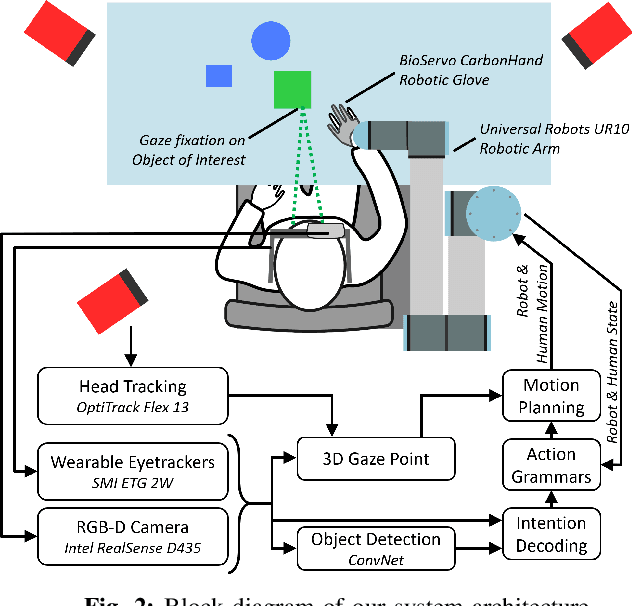
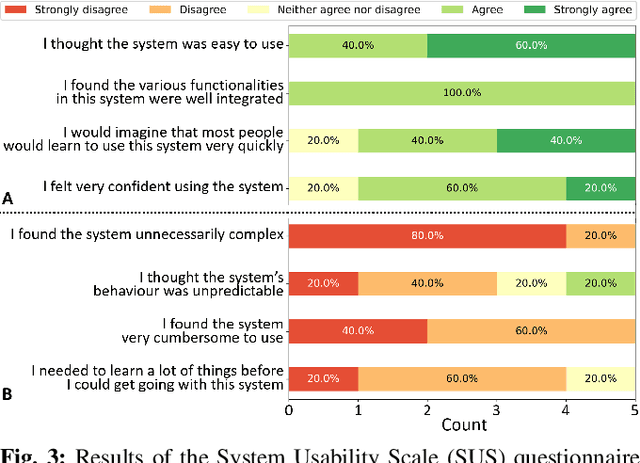
Assistive and Wearable Robotics have the potential to support humans with different types of motor impairments to become independent and fulfil their activities of daily living successfully. The success of these robot systems, however, relies on the ability to meaningfully decode human action intentions and carry them out appropriately. Neural interfaces have been explored for use in such system with several successes, however, they tend to be invasive and require training periods in the order of months. We present a robotic system for human augmentation, capable of actuating the user's arm and fingers for them, effectively restoring the capability of reaching, grasping and manipulating objects; controlled solely through the user's eye movements. We combine wearable eye tracking, the visual context of the environment and the structural grammar of human actions to create a cognitive-level assistive robotic setup that enables the users in fulfilling activities of daily living, while conserving interpretability, and the agency of the user. The interface is worn, calibrated and ready to use within 5 minutes. Users learn to control and make successful use of the system with an additional 5 minutes of interaction. The system is tested with 5 healthy participants, showing an average success rate of $96.6\%$ on first attempt across 6 tasks.