 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Deterministic Planning for Hyperproperty Verification
Paper and Code
May 22, 2024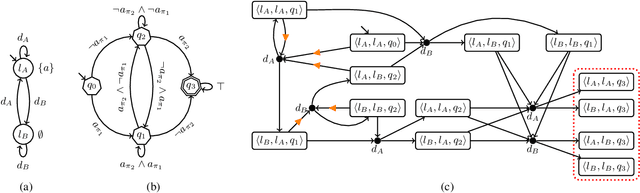
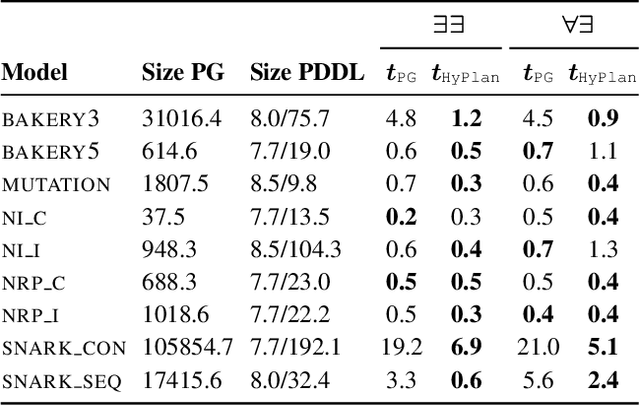
Non-deterministic planning aims to find a policy that achieves a given objective in an environment where actions have uncertain effects, and the agent - potentially - only observes parts of the current state. Hyperproperties are properties that relate multiple paths of a system and can, e.g., capture security and information-flow policies. Popular logics for expressing temporal hyperproperties - such as HyperLTL - extend LTL by offering selective quantification over executions of a system. In this paper, we show that planning offers a powerful intermediate language for the automated verification of hyperproperties. Concretely, we present an algorithm that, given a HyperLTL verification problem, constructs a non-deterministic multi-agent planning instance (in the form of a QDec-POMDP) that, when admitting a plan, implies the satisfaction of the verification problem. We show that for large fragments of HyperLTL, the resulting planning instance corresponds to a classical, FOND, or POND planning problem. We implement our encoding in a prototype verification tool and report on encouraging experimental results.