 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise Models in Feature-based Stereo Visual Odometry
Paper and Code
Jul 01, 2016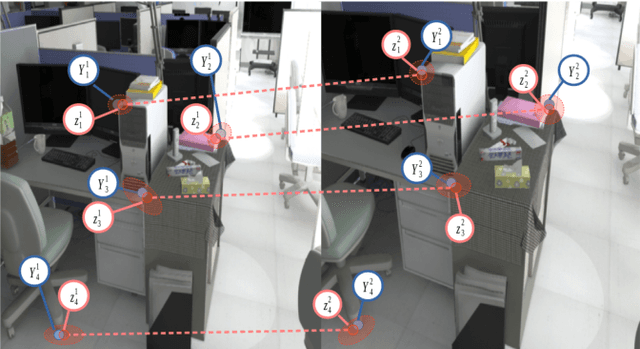
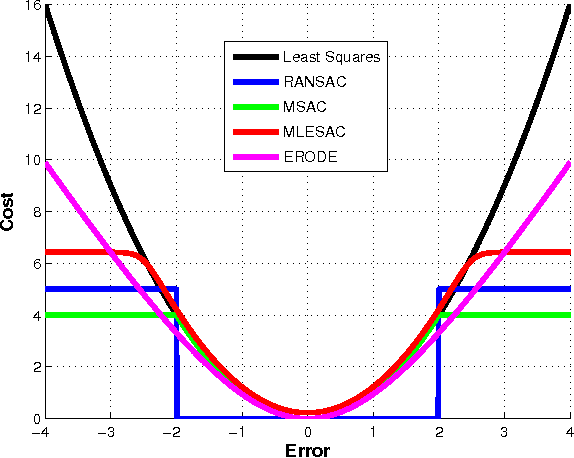
Feature-based visual structure and motion reconstruction pipelines, common in visual odometry and large-scale reconstruction from photos, use the location of corresponding features in different images to determine the 3D structure of the scene, as well as the camera parameters associated with each image. The noise model, which defines the likelihood of the location of each feature in each image, is a key factor in the accuracy of such pipelines, alongside optimization strategy. Many different noise models have been proposed in the literature; in this paper we investigate the performance of several. We evaluate these models specifically w.r.t. stereo visual odometry, as this task is both simple (camera intrinsics are constant and known; geometry can be initialized reliably) and has datasets with ground truth readily available (KITTI Odometry and New Tsukuba Stereo Dataset). Our evaluation shows that noise models which are more adaptable to the varying nature of noise generally perform better.