 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNNLander-VeriF: A Neural Network Formal Verification Framework for Vision-Based Autonomous Aircraft Landing
Paper and Code
Mar 29, 2022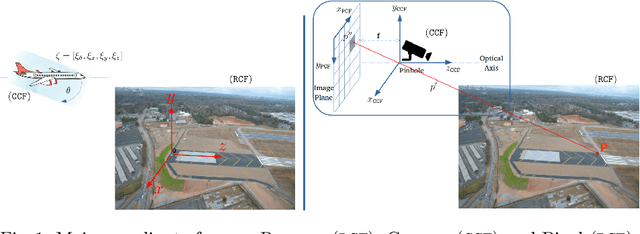
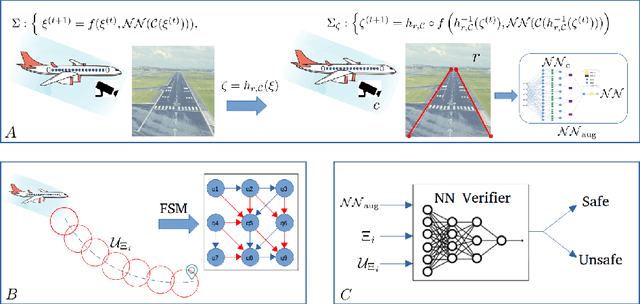

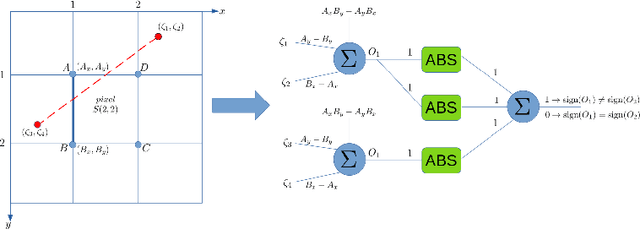
In this paper, we consider the problem of formally verifying a Neural Network (NN) based autonomous landing system. In such a system, a NN controller processes images from a camera to guide the aircraft while approaching the runway. A central challenge for the safety and liveness verification of vision-based closed-loop systems is the lack of mathematical models that captures the relation between the system states (e.g., position of the aircraft) and the images processed by the vision-based NN controller. Another challenge is the limited abilities of state-of-the-art NN model checkers. Such model checkers can reason only about simple input-output robustness properties of neural networks. This limitation creates a gap between the NN model checker abilities and the need to verify a closed-loop system while considering the aircraft dynamics, the perception components, and the NN controller. To this end, this paper presents NNLander-VeriF, a framework to verify vision-based NN controllers used for autonomous landing. NNLander-VeriF addresses the challenges above by exploiting geometric models of perspective cameras to obtain a mathematical model that captures the relation between the aircraft states and the inputs to the NN controller. By converting this model into a NN (with manually assigned weights) and composing it with the NN controller, one can capture the relation between aircraft states and control actions using one augmented NN. Such an augmented NN model leads to a natural encoding of the closed-loop verification into several NN robustness queries, which state-of-the-art NN model checkers can handle. Finally, we evaluate our framework to formally verify the properties of a trained NN and we show its efficiency.