 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeurally-Guided Procedural Models: Amortized Inference for Procedural Graphics Programs using Neural Networks
Paper and Code
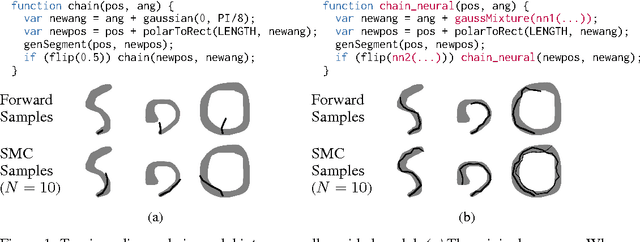

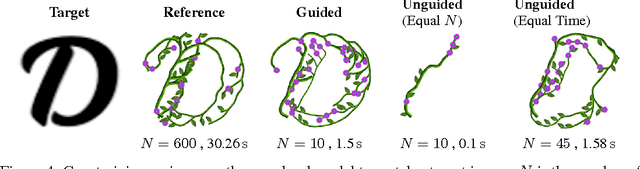
Probabilistic inference algorithms such as Sequential Monte Carlo (SMC) provide powerful tools for constraining procedural models in computer graphics, but they require many samples to produce desirable results. In this paper, we show how to create procedural models which learn how to satisfy constraints. We augment procedural models with neural networks which control how the model makes random choices based on the output it has generated thus far. We call such models neurally-guided procedural models. As a pre-computation, we train these models to maximize the likelihood of example outputs generated via SMC. They are then used as efficient SMC importance samplers, generating high-quality results with very few samples. We evaluate our method on L-system-like models with image-based constraints. Given a desired quality threshold, neurally-guided models can generate satisfactory results up to 10x faster than unguided models.