 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Observer with Lyapunov Stability Guarantee for Uncertain Nonlinear Systems
Paper and Code
Aug 27, 2022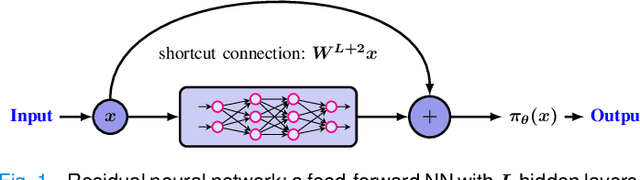
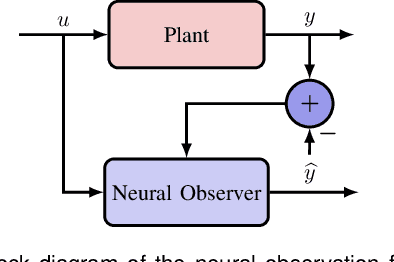
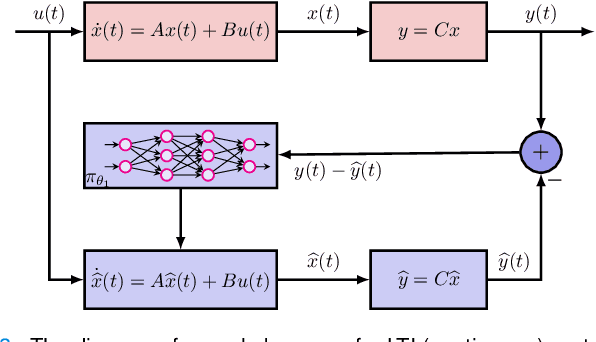
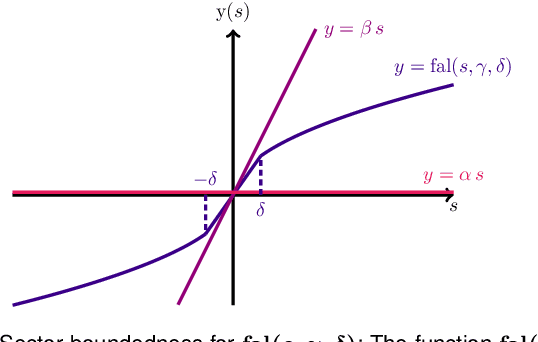
In this paper, we propose a novel nonlinear observer, called the neural observer, for observation tasks of linear time-invariant (LTI) systems and uncertain nonlinear systems by introducing the neural network (NN) into the design of observers. By exploring the method of NN representation to the NN mapping vector, we derive stability analyses (e.g., exponential convergence rate) of LTI and uncertain nonlinear systems that pave the way to solve observation problems using linear matrix inequalities (LMIs) only. Remarkably, the neural observer designed for uncertain systems is based on the ideology of the active disturbance rejection control (ADRC), which can measure the uncertainty in real-time. The LMI results are also significant since we reveal that the observability and controllability of system matrices are required for the existence of solutions of LMIs. Finally, we verify the availability of neural observers on three simulation cases, including the X-29A aircraft model, the nonlinear pendulum, and the four-wheel steering vehicle.