 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Network Optimal Feedback Control with Guaranteed Local Stability
Paper and Code
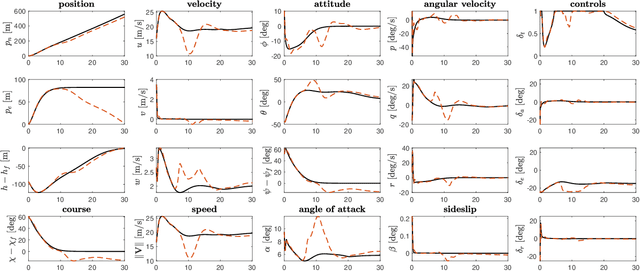
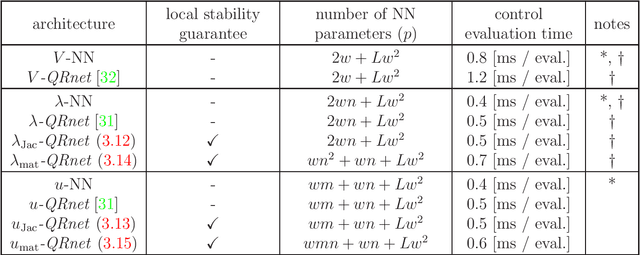
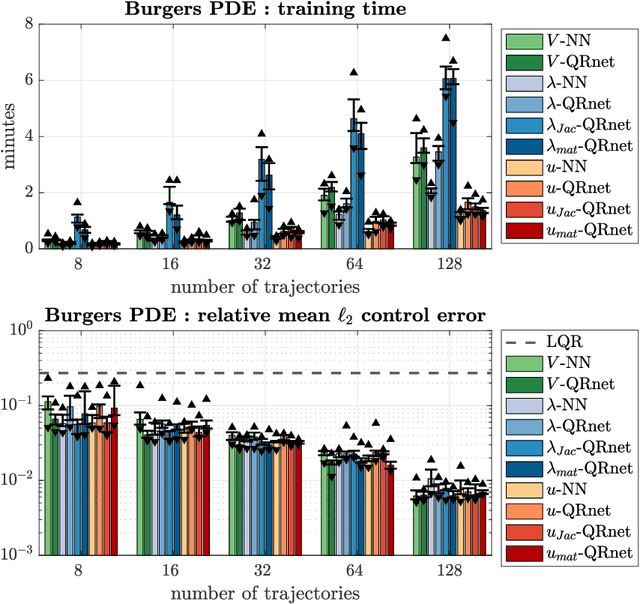
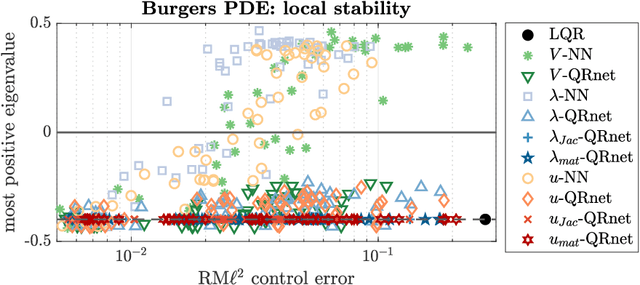
Recent research shows that deep learning can be an effective tool for designing optimal feedback controllers for high-dimensional nonlinear dynamic systems. But the behavior of these neural network (NN) controllers is still not well understood. In particular, some NNs with high test accuracy can fail to even locally stabilize the dynamic system. To address this challenge we propose several novel NN architectures, which we show guarantee local stability while retaining the semi-global approximation capacity to learn the optimal feedback policy. The proposed architectures are compared against standard NN feedback controllers through numerical simulations of two high-dimensional nonlinear optimal control problems (OCPs): stabilization of an unstable Burgers-type partial differential equation (PDE), and altitude and course tracking for a six degree-of-freedom (6DoF) unmanned aerial vehicle (UAV). The simulations demonstrate that standard NNs can fail to stabilize the dynamics even when trained well, while the proposed architectures are always at least locally stable. Moreover, the proposed controllers are found to be near-optimal in testing.