 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Architecture Search Over a Graph Search Space
Paper and Code
Dec 27, 2018

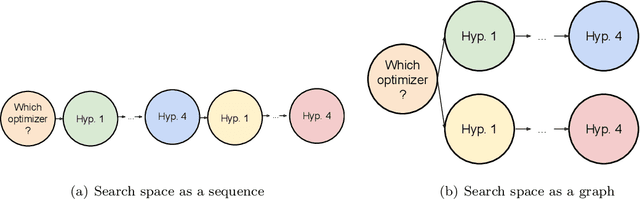

Neural architecture search (NAS) enabled the discovery of state-of-the-art architectures in many domains. However, the success of NAS depends on the definition of the search space, i.e. the set of the possible to generate neural architectures. State-of-the-art search spaces are defined as a static sequence of decisions and a set of available actions for each decision, where each possible sequence of actions defines an architecture. We propose a more expressive formulation of NAS, using a graph search space. Our search space is defined as a graph where each decision is a vertex and each action is an edge. Thus the sequence of decisions defining an architecture is not fixed but is determined dynamically by the actions selected. The proposed approach allows to model iterative and branching aspects of the architecture design process. In this form, stronger priors about the search can be induced. We demonstrate in simulation basic iterative and branching search structures and show that using the graph representation improves sample efficiency.