 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNEMO: Future Object Localization Using Noisy Ego Priors
Paper and Code
Sep 17, 2019

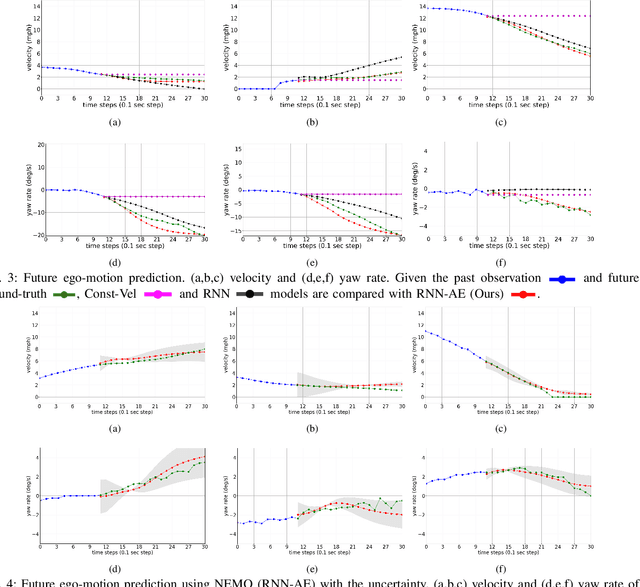

Predictive models for forecasting future behavior of road agents should consider the multi-modal nature and be aware of the uncertainty of their predictions. Particularly from the egocentric view where the motion of other agents is captured with respect to the ego-motion, the uncertainty of ego-motion prediction is critical to determine their interactive reactions and behaviors. Along this line, we propose NEMO (Noisy Ego MOtion priors for future object localization) for future forecast of road agents in the egocentric view. A predictive distribution of future forecast is jointly modeled with the uncertainty of predictions. For this, we divide the problem into two tasks: future ego-motion prediction and future object localization. We first model the multi-modal distribution of future ego-motion with uncertainty estimates. The resulting distribution of ego-behavior is used to sample multiple modes of future ego-motion. Then, each modality is used as a prior to understand the interactions between the ego-vehicle and target agent. We predict the multi-modal future locations of the target from individual modes of the ego-vehicle, modeling the uncertainty of target's behavior. To this end, we extensively evaluate the proposed framework using the publicly available benchmark dataset (HEV-I) with an addition of Inertial Measurement Unit (IMU) data to it.