 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNegative Frames Matter in Egocentric Visual Query 2D Localization
Paper and Code
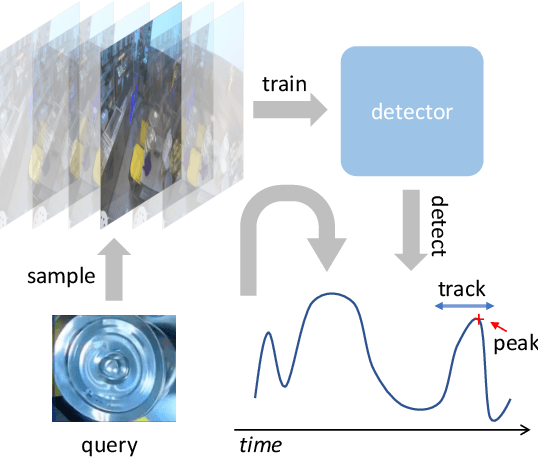
The recently released Ego4D dataset and benchmark significantly scales and diversifies the first-person visual perception data. In Ego4D, the Visual Queries 2D Localization task aims to retrieve objects appeared in the past from the recording in the first-person view. This task requires a system to spatially and temporally localize the most recent appearance of a given object query, where query is registered by a single tight visual crop of the object in a different scene. Our study is based on the three-stage baseline introduced in the Episodic Memory benchmark. The baseline solves the problem by detection and tracking: detect the similar objects in all the frames, then run a tracker from the most confident detection result. In the VQ2D challenge, we identified two limitations of the current baseline. (1) The training configuration has redundant computation. Although the training set has millions of instances, most of them are repetitive and the number of unique object is only around 14.6k. The repeated gradient computation of the same object lead to an inefficient training; (2) The false positive rate is high on background frames. This is due to the distribution gap between training and evaluation. During training, the model is only able to see the clean, stable, and labeled frames, but the egocentric videos also have noisy, blurry, or unlabeled background frames. To this end, we developed a more efficient and effective solution. Concretely, we bring the training loop from ~15 days to less than 24 hours, and we achieve 0.17% spatial-temporal AP, which is 31% higher than the baseline. Our solution got the first ranking on the public leaderboard. Our code is publicly available at https://github.com/facebookresearch/vq2d_cvpr.