Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNDD: A 3D Point Cloud Descriptor Based on Normal Distribution for Loop Closure Detection
Paper and Code
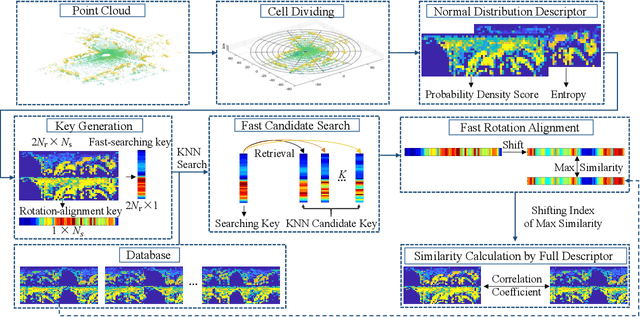
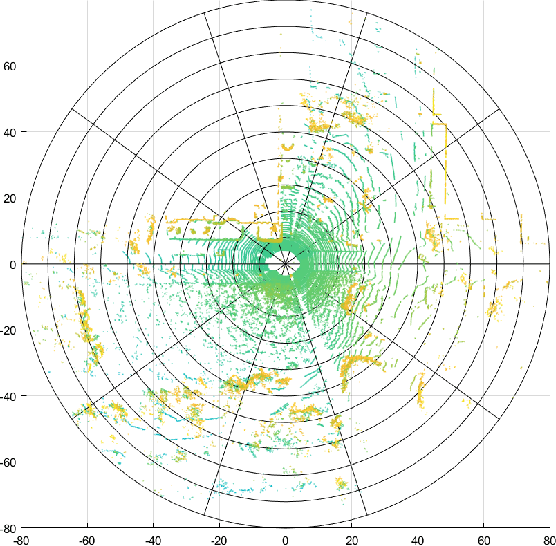
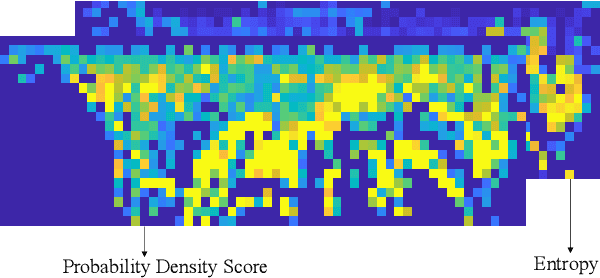
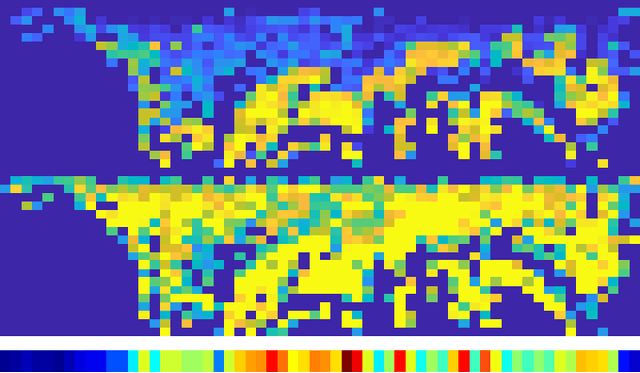
Loop closure detection is a key technology for long-term robot navigation in complex environments. In this paper, we present a global descriptor, named Normal Distribution Descriptor (NDD), for 3D point cloud loop closure detection. The descriptor encodes both the probability density score and entropy of a point cloud as the descriptor. We also propose a fast rotation alignment process and use correlation coefficient as the similarity between descriptors. Experimental results show that our approach outperforms the state-of-the-art point cloud descriptors in both accuracy and efficency. The source code is available and can be integrated into existing LiDAR odometry and mapping (LOAM) systems.
* Proceedings of the IEEE/RSJ International Conference on
Intelligent Robots and Systems 2022
View paper on