Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNAVREN-RL: Learning to fly in real environment via end-to-end deep reinforcement learning using monocular images
Paper and Code
Jul 22, 2018

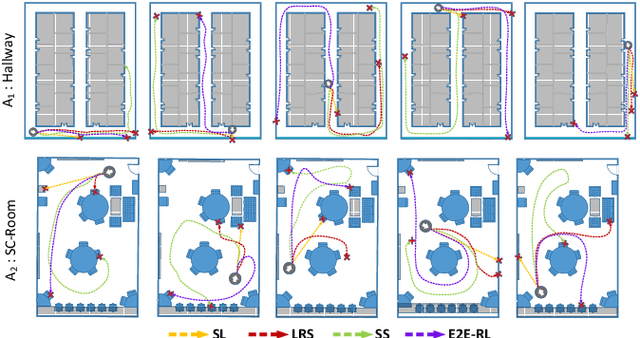

We present NAVREN-RL, an approach to NAVigate an unmanned aerial vehicle in an indoor Real ENvironment via end-to-end reinforcement learning RL. A suitable reward function is designed keeping in mind the cost and weight constraints for micro drone with minimum number of sensing modalities. Collection of small number of expert data and knowledge based data aggregation is integrated into the RL process to aid convergence. Experimentation is carried out on a Parrot AR drone in different indoor arenas and the results are compared with other baseline technologies. We demonstrate how the drone successfully avoids obstacles and navigates across different arenas.
View paper on