Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavigation In Urban Environments Amongst Pedestrians Using Multi-Objective Deep Reinforcement Learning
Paper and Code
Oct 11, 2021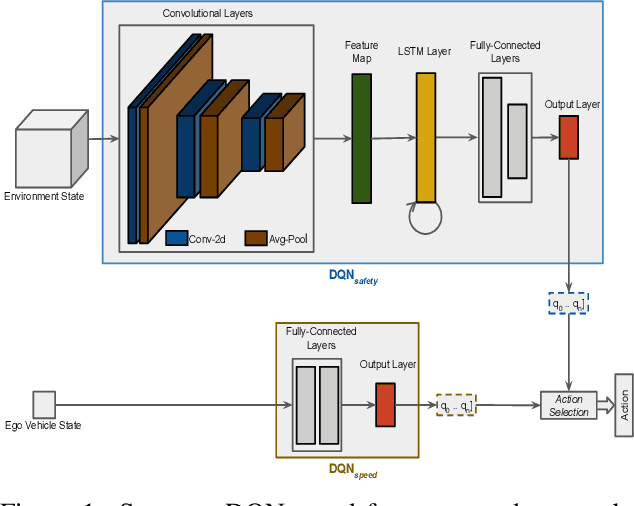
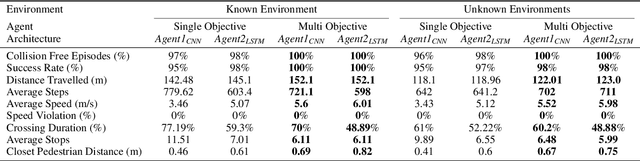
Urban autonomous driving in the presence of pedestrians as vulnerable road users is still a challenging and less examined research problem. This work formulates navigation in urban environments as a multi objective reinforcement learning problem. A deep learning variant of thresholded lexicographic Q-learning is presented for autonomous navigation amongst pedestrians. The multi objective DQN agent is trained on a custom urban environment developed in CARLA simulator. The proposed method is evaluated by comparing it with a single objective DQN variant on known and unknown environments. Evaluation results show that the proposed method outperforms the single objective DQN variant with respect to all aspects.
* 24th IEEE International Conference on Intelligent Transportation
Systems - ITSC2021, Sep 2021, Indianapolis, United States
View paper on