 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMVP-Net: Multiple View Pointwise Semantic Segmentation of Large-Scale Point Clouds
Paper and Code
Jan 30, 2022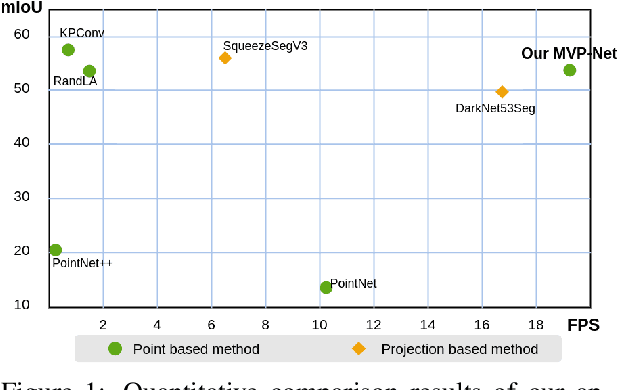

Semantic segmentation of 3D point cloud is an essential task for autonomous driving environment perception. The pipeline of most pointwise point cloud semantic segmentation methods includes points sampling, neighbor searching, feature aggregation, and classification. Neighbor searching method like K-nearest neighbors algorithm, KNN, has been widely applied. However, the complexity of KNN is always a bottleneck of efficiency. In this paper, we propose an end-to-end neural architecture, Multiple View Pointwise Net, MVP-Net, to efficiently and directly infer large-scale outdoor point cloud without KNN or any complex pre/postprocessing. Instead, assumption-based sorting and multi-rotation of point cloud methods are introduced to point feature aggregation and receptive field expanding. Numerical experiments show that the proposed MVP-Net is 11 times faster than the most efficient pointwise semantic segmentation method RandLA-Net and achieves the same accuracy on the large-scale benchmark SemanticKITTI dataset.