 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMVHM: A Large-Scale Multi-View Hand Mesh Benchmark for Accurate 3D Hand Pose Estimation
Paper and Code
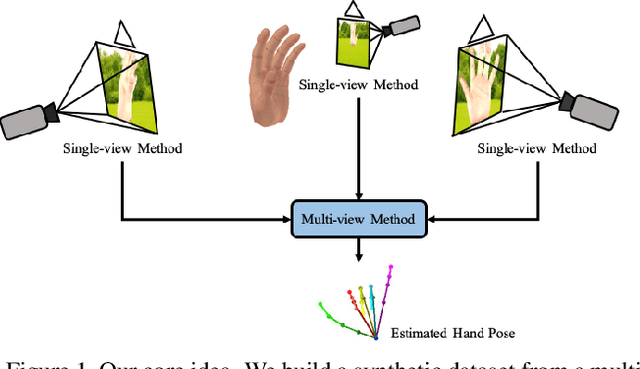
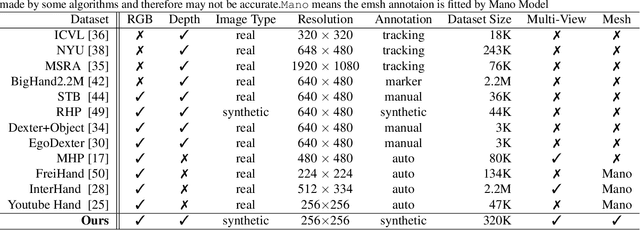

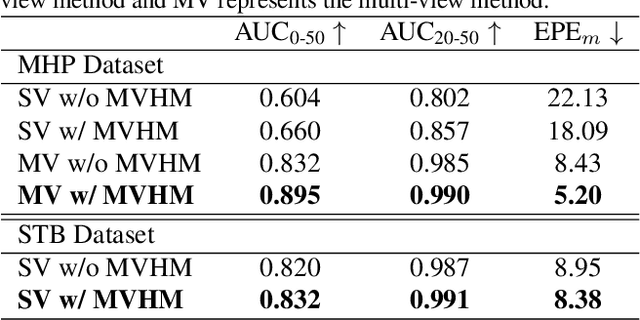
Estimating 3D hand poses from a single RGB image is challenging because depth ambiguity leads the problem ill-posed. Training hand pose estimators with 3D hand mesh annotations and multi-view images often results in significant performance gains. However, existing multi-view datasets are relatively small with hand joints annotated by off-the-shelf trackers or automated through model predictions, both of which may be inaccurate and can introduce biases. Collecting a large-scale multi-view 3D hand pose images with accurate mesh and joint annotations is valuable but strenuous. In this paper, we design a spin match algorithm that enables a rigid mesh model matching with any target mesh ground truth. Based on the match algorithm, we propose an efficient pipeline to generate a large-scale multi-view hand mesh (MVHM) dataset with accurate 3D hand mesh and joint labels. We further present a multi-view hand pose estimation approach to verify that training a hand pose estimator with our generated dataset greatly enhances the performance. Experimental results show that our approach achieves the performance of 0.990 in $\text{AUC}_{\text{20-50}}$ on the MHP dataset compared to the previous state-of-the-art of 0.939 on this dataset. Our datasset is public available. \footnote{\url{https://github.com/Kuzphi/MVHM}} Our datasset is available at~\href{https://github.com/Kuzphi/MVHM}{\color{blue}{https://github.com/Kuzphi/MVHM}}.