 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMutual Localization: Two Camera Relative 6-DOF Pose Estimation from Reciprocal Fiducial Observation
Paper and Code
Apr 01, 2013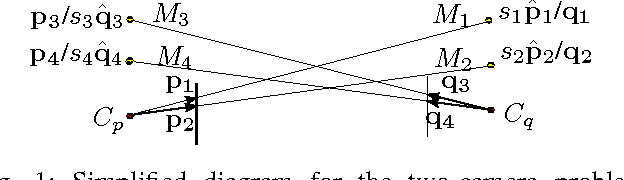
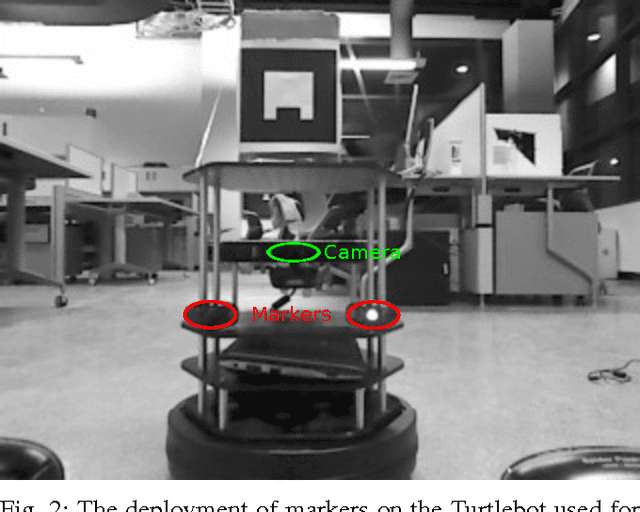
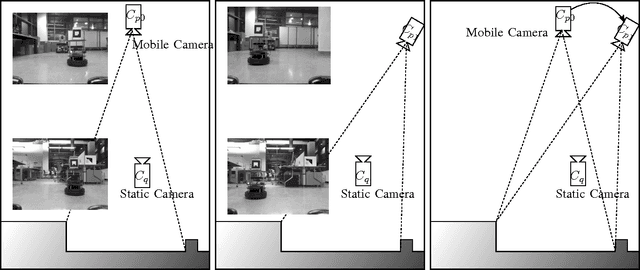
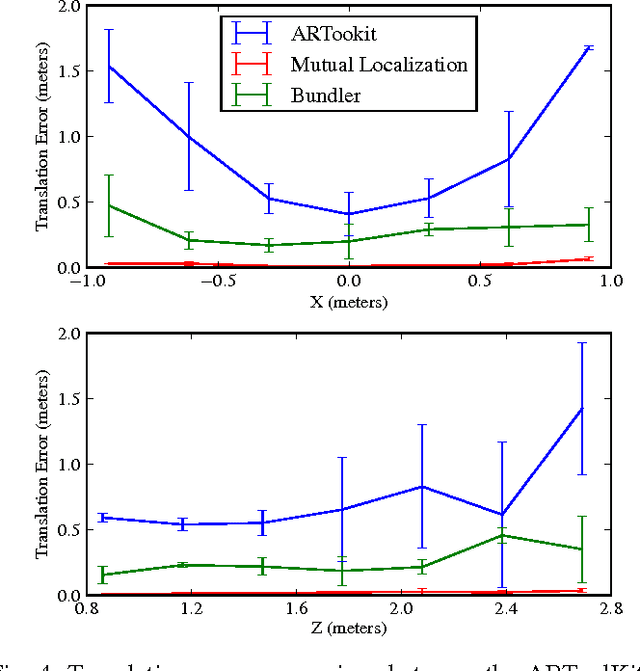
Concurrently estimating the 6-DOF pose of multiple cameras or robots---cooperative localization---is a core problem in contemporary robotics. Current works focus on a set of mutually observable world landmarks and often require inbuilt egomotion estimates; situations in which both assumptions are violated often arise, for example, robots with erroneous low quality odometry and IMU exploring an unknown environment. In contrast to these existing works in cooperative localization, we propose a cooperative localization method, which we call mutual localization, that uses reciprocal observations of camera-fiducials to obviate the need for egomotion estimates and mutually observable world landmarks. We formulate and solve an algebraic formulation for the pose of the two camera mutual localization setup under these assumptions. Our experiments demonstrate the capabilities of our proposal egomotion-free cooperative localization method: for example, the method achieves 2cm range and 0.7 degree accuracy at 2m sensing for 6-DOF pose. To demonstrate the applicability of the proposed work, we deploy our method on Turtlebots and we compare our results with ARToolKit and Bundler, over which our method achieves a 10 fold improvement in translation estimation accuracy.