 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultitask Network for Joint Object Detection, Semantic Segmentation and Human Pose Estimation in Vehicle Occupancy Monitoring
Paper and Code
May 03, 2022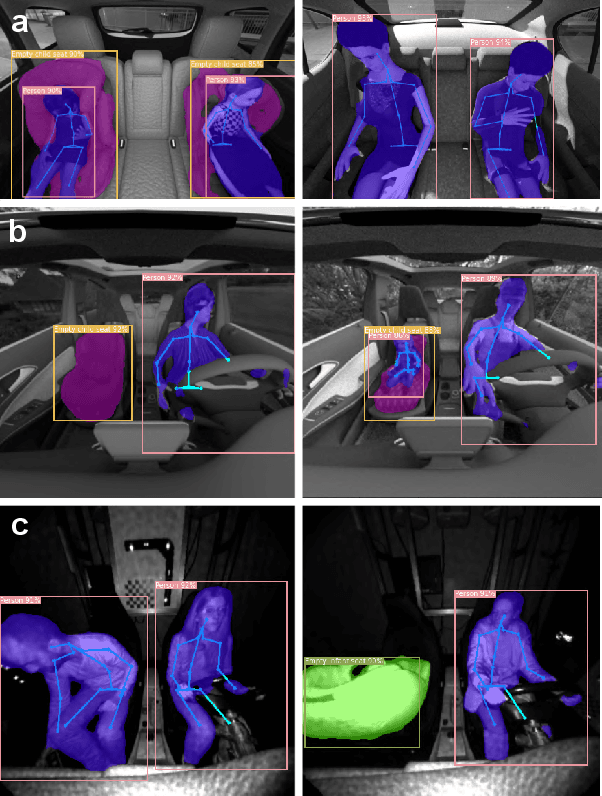
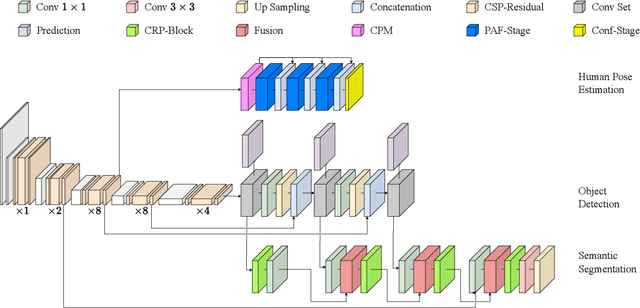
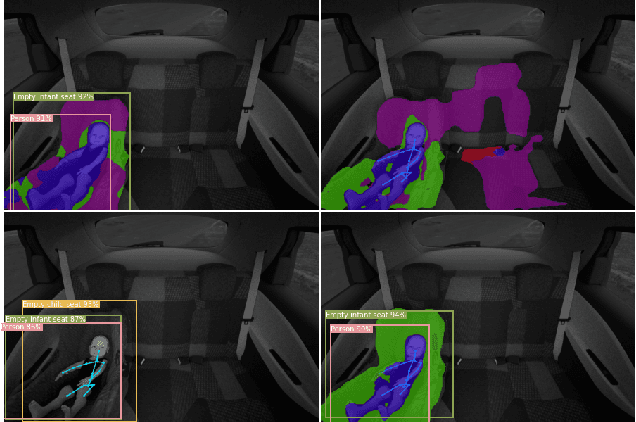

In order to ensure safe autonomous driving, precise information about the conditions in and around the vehicle must be available. Accordingly, the monitoring of occupants and objects inside the vehicle is crucial. In the state-of-the-art, single or multiple deep neural networks are used for either object recognition, semantic segmentation, or human pose estimation. In contrast, we propose our Multitask Detection, Segmentation and Pose Estimation Network (MDSP) -- the first multitask network solving all these three tasks jointly in the area of occupancy monitoring. Due to the shared architecture, memory and computing costs can be saved while achieving higher accuracy. Furthermore, our architecture allows a flexible combination of the three mentioned tasks during a simple end-to-end training. We perform comprehensive evaluations on the public datasets SVIRO and TiCaM in order to demonstrate the superior performance.