 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple-Step Greedy Policies in Online and Approximate Reinforcement Learning
Paper and Code
Sep 20, 2018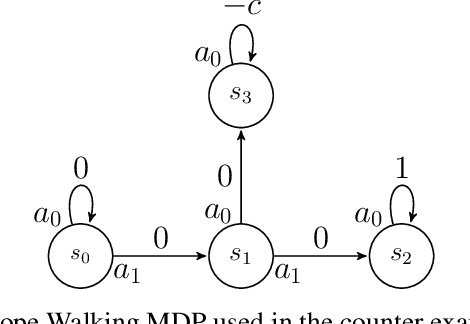
Multiple-step lookahead policies have demonstrated high empirical competence in Reinforcement Learning, via the use of Monte Carlo Tree Search or Model Predictive Control. In a recent work \cite{efroni2018beyond}, multiple-step greedy policies and their use in vanilla Policy Iteration algorithms were proposed and analyzed. In this work, we study multiple-step greedy algorithms in more practical setups. We begin by highlighting a counter-intuitive difficulty, arising with soft-policy updates: even in the absence of approximations, and contrary to the 1-step-greedy case, monotonic policy improvement is not guaranteed unless the update stepsize is sufficiently large. Taking particular care about this difficulty, we formulate and analyze online and approximate algorithms that use such a multi-step greedy operator.