 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple Peg-in-Hole Assembly of Tightly Coupled Multi-manipulator Using Learning-based Visual Servo
Paper and Code
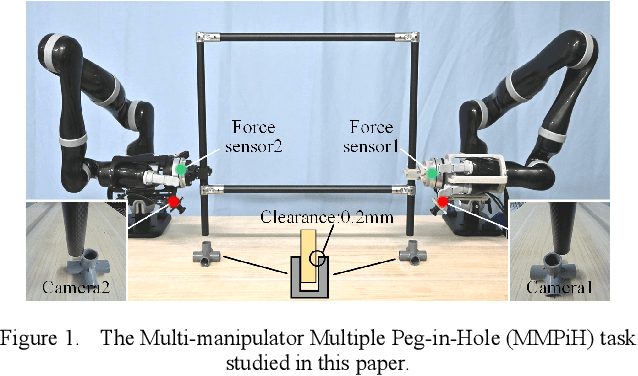

Multiple peg-in-hole assembly is one of the fundamental tasks in robotic assembly. In the multiple peg-in-hole task for large-sized parts, it is challenging for a single manipulator to simultaneously align multiple distant pegs and holes, necessitating tightly coupled multi-manipulator systems. For such Multi-manipulator Multiple Peg-in-Hole (MMPiH) tasks, we proposes a collaborative visual servo control framework that uses only the monocular in-hand cameras of each manipulator to reduce positioning errors. Initially, we train a state classification neural network and a positioning neural network. The former is used to divide the states of peg and hole in the image into three categories: obscured, separated and overlapped, while the latter determines the position of the peg and hole in the image. Based on these findings, we propose a method to integrate the visual features of multiple manipulators using virtual forces, which can naturally combine with the cooperative controller of the multi-manipulator system. To generalize our approach to holes of different appearances, we varied the appearance of the holes during the dataset generation process. The results confirm that by considering the appearance of the holes, classification accuracy and positioning precision can be improved. Finally, the results show that our method achieves an 85% success rate in dual-manipulator dual peg-in-hole tasks with a clearance of 0.2 mm.