 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Gaussian Mixture Model for Realtime Roadside LiDAR Object Detection
Paper and Code
Apr 20, 2022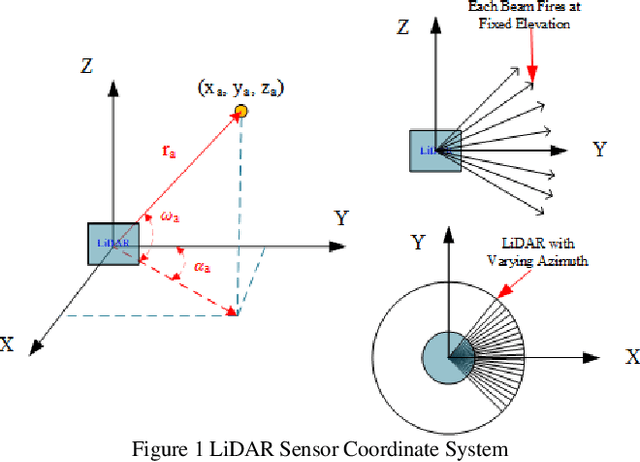
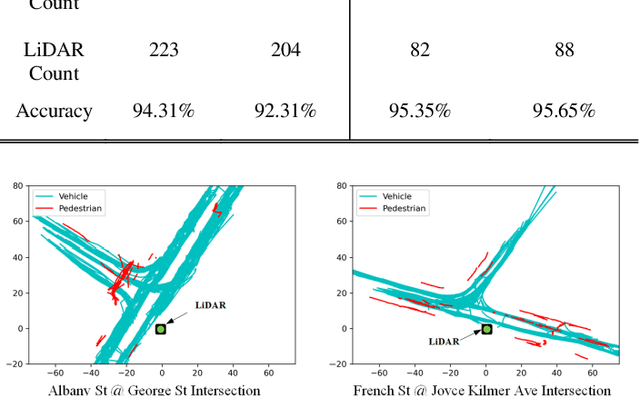
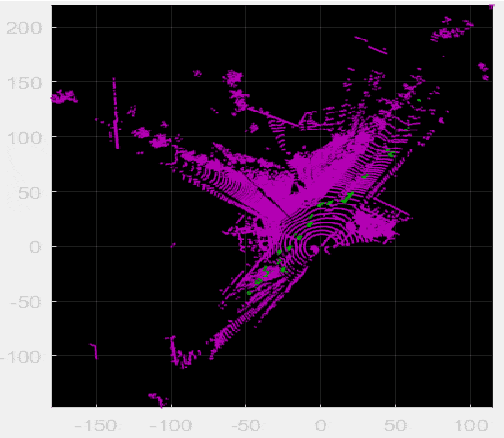
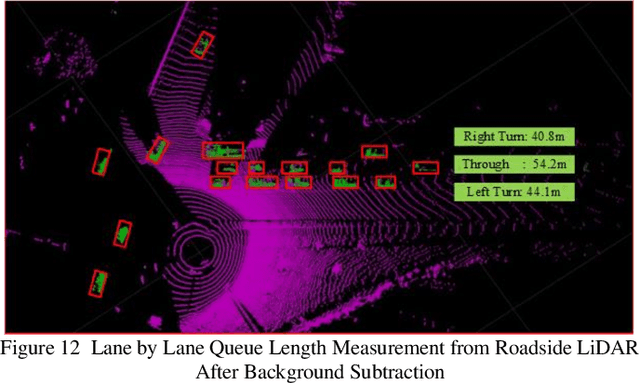
Background modeling is widely used for intelligent surveillance systems to detect the moving targets by subtracting the static background components. Most roadside LiDAR object detection methods filter out foreground points by comparing new points to pre-trained background references based on descriptive statistics over many frames (e.g., voxel density, slopes, maximum distance). These solutions are not efficient under heavy traffic, and parameter values are hard to transfer from one scenario to another. In early studies, the video-based background modeling methods were considered not suitable for roadside LiDAR surveillance systems due to the sparse and unstructured point clouds data. In this paper, the raw LiDAR data were transformed into a multi-dimensional tensor structure based on the elevation and azimuth value of each LiDAR point. With this high-order data representation, we break the barrier to allow the efficient Gaussian Mixture Model (GMM) method for roadside LiDAR background modeling. The probabilistic GMM is built with superior agility and real-time capability. The proposed Method was compared against two state-of-the-art roadside LiDAR background models and evaluated based on point level, object level, and path level, demonstrating better robustness under heavy traffic and challenging weather. This multimodal GMM method is capable of handling dynamic backgrounds with noisy measurements and substantially enhances the infrastructure-based LiDAR object detection, whereby various 3D modeling for smart city applications could be created