 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Data Fusion for Power-On-and-GoRobotic Systems in Retail
Paper and Code
Mar 23, 2021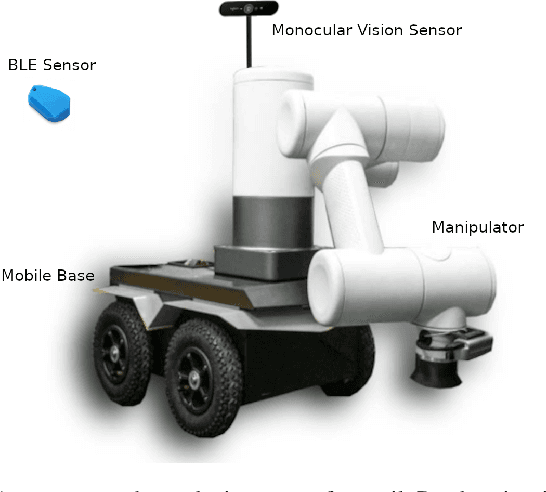
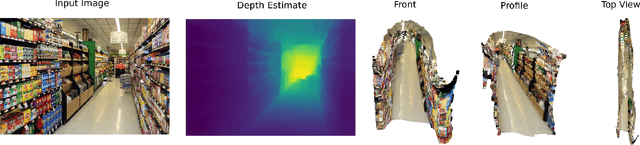
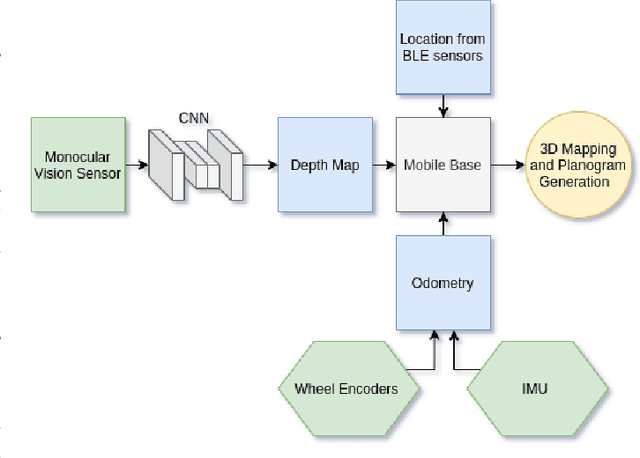
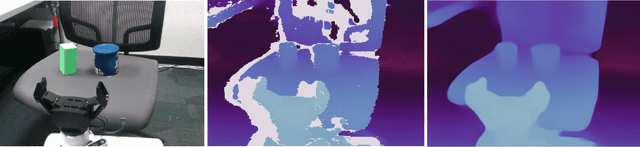
Robotic systems for retail have gained a lot of attention due to the labor-intensive nature of such business environments. Many tasks have the potential to be automated via intelligent robotic systems that have manipulation capabilities. For example, empty shelves can be replenished, stray products can be picked up or new items can be delivered. However, many challenges make the realization of this vision a challenge. In particular, robots are still too expensive and do not work out of the box. In this paper, we discuss a work-in-progress approach for enabling power-on-and-go robots in retail environments through a combination of active, physical sensors and passive, artificial sensors. In particular, we use low-cost hardware sensors in conjunction with machine learning techniques in order to generate high-quality environmental information. More specifically, we present a setup in which a standard monocular camera and Bluetooth low-energy yield a reliable robot system that can immediately be used after placing a couple of sensors in the environment. The camera information is used to synthesize accurate 3D point clouds, whereas the BLE data is used to integrate the data into a complex map of the environment. The combination of active and passive sensing enables high-quality sensing capabilities at a fraction of the costs traditionally associated with such tasks.