 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-task Learning for Continuous Control
Paper and Code
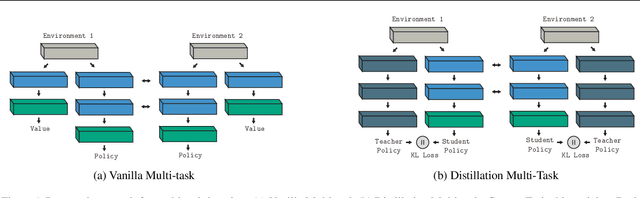
Reliable and effective multi-task learning is a prerequisite for the development of robotic agents that can quickly learn to accomplish related, everyday tasks. However, in the reinforcement learning domain, multi-task learning has not exhibited the same level of success as in other domains, such as computer vision. In addition, most reinforcement learning research on multi-task learning has been focused on discrete action spaces, which are not used for robotic control in the real-world. In this work, we apply multi-task learning methods to continuous action spaces and benchmark their performance on a series of simulated continuous control tasks. Most notably, we show that multi-task learning outperforms our baselines and alternative knowledge sharing methods.