 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Stream Attention Learning for Monocular Vehicle Velocity and Inter-Vehicle Distance Estimation
Paper and Code
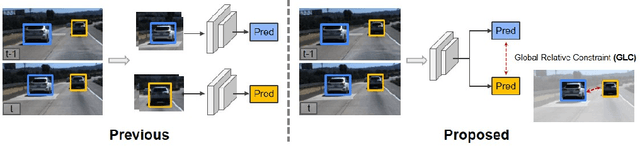
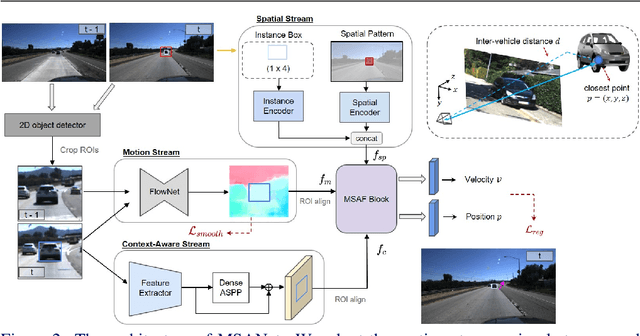

Vehicle velocity and inter-vehicle distance estimation are essential for ADAS (Advanced driver-assistance systems) and autonomous vehicles. To save the cost of expensive ranging sensors, recent studies focus on using a low-cost monocular camera to perceive the environment around the vehicle in a data-driven fashion. Existing approaches treat each vehicle independently for perception and cause inconsistent estimation. Furthermore, important information like context and spatial relation in 2D object detection is often neglected in the velocity estimation pipeline. In this paper, we explore the relationship between vehicles of the same frame with a global-relative-constraint (GLC) loss to encourage consistent estimation. A novel multi-stream attention network (MSANet) is proposed to extract different aspects of features, e.g., spatial and contextual features, for joint vehicle velocity and inter-vehicle distance estimation. Experiments show the effectiveness and robustness of our proposed approach. MSANet outperforms state-of-the-art algorithms on both the KITTI dataset and TuSimple velocity dataset.