 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-source Pseudo-label Learning of Semantic Segmentation for the Scene Recognition of Agricultural Mobile Robots
Paper and Code
Feb 12, 2021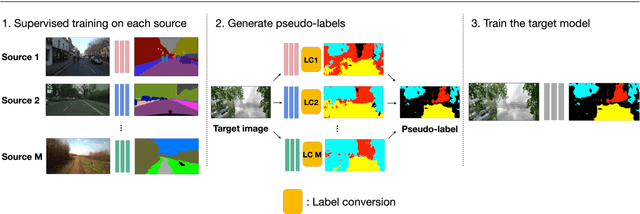
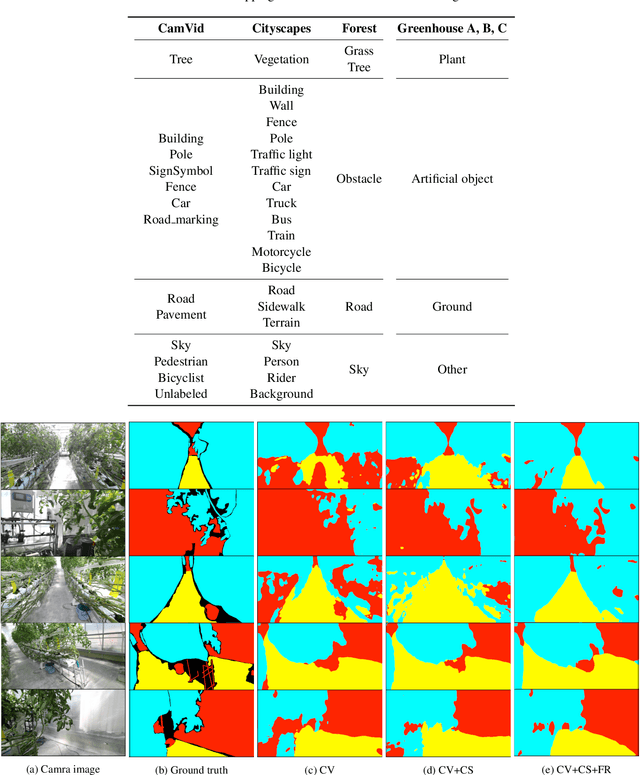
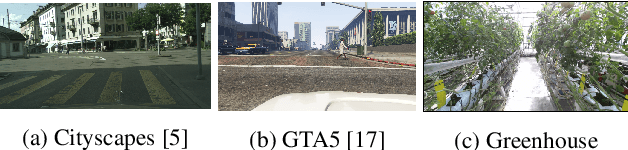
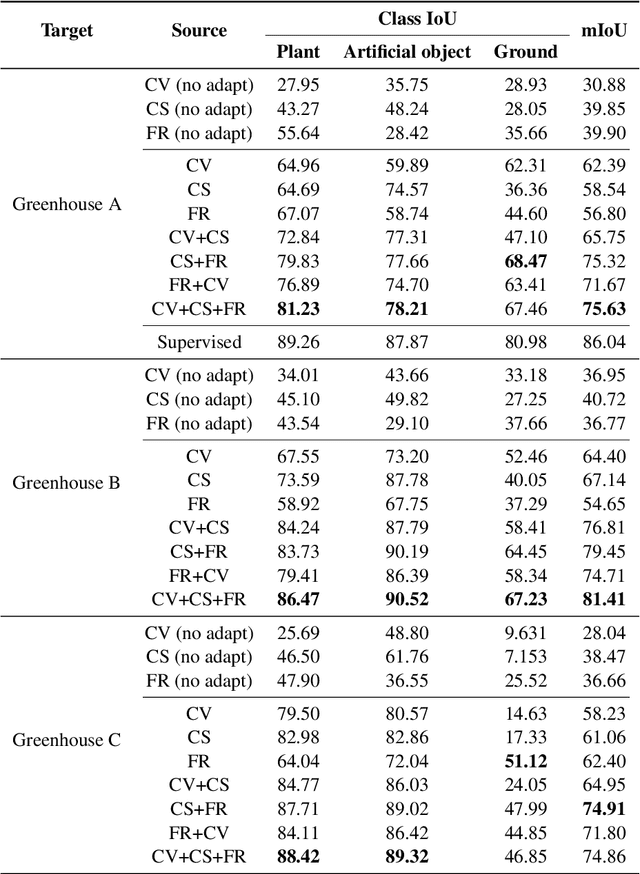
This paper describes a novel method of training a semantic segmentation model for environment recognition of agricultural mobile robots by unsupervised domain adaptation exploiting publicly available datasets of outdoor scenes that are different from our target environments i.e., greenhouses. In conventional semantic segmentation methods, the labels are given by manual annotation, which is a tedious and time-consuming task. A method to work around the necessity of the manual annotation is unsupervised domain adaptation (UDA) that transfer knowledge from labeled source datasets to unlabeled target datasets. Most of the UDA methods of semantic segmentation are validated by tasks of adaptation from non-photorealistic synthetic images of urban scenes to real ones. However, the effectiveness of the methods is not well studied in the case of adaptation to other types of environments, such as greenhouses. In addition, it is not always possible to prepare appropriate source datasets for such environments. In this paper, we adopt an existing training method of UDA to a task of training a model for greenhouse images. We propose to use multiple publicly available datasets of outdoor images as source datasets, and also propose a simple yet effective method of generating pseudo-labels by transferring knowledge from the source datasets that have different appearance and a label set from the target datasets. We demonstrate in experiments that by combining our proposed method of pseudo-label generation with the existing training method, the performance was improved by up to 14.3% of mIoU compared to the best score of the single-source training.