 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Session Visual SLAM for Illumination Invariant Localization in Indoor Environments
Paper and Code
Mar 05, 2021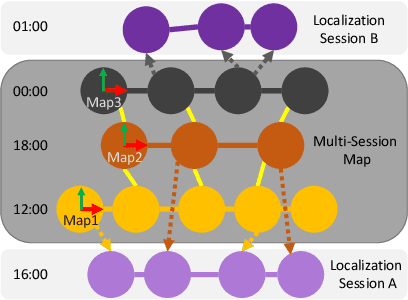
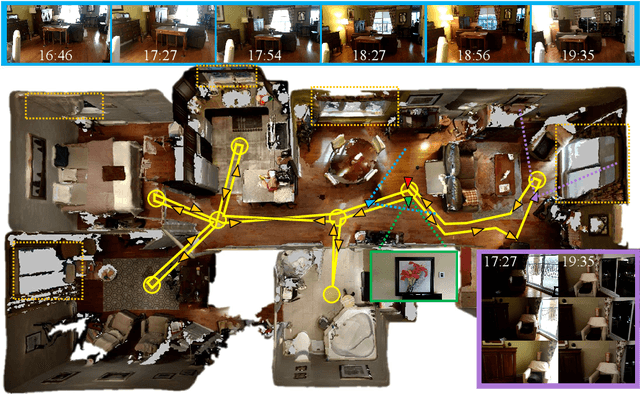
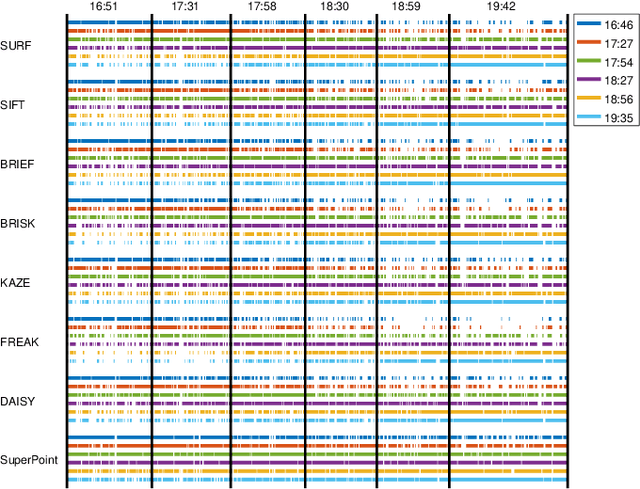
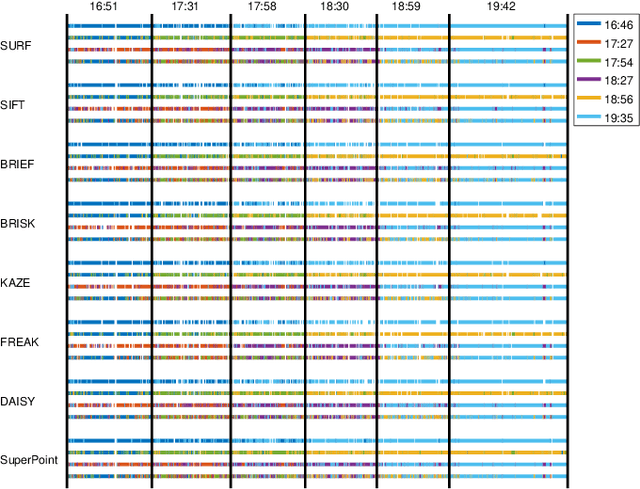
For robots navigating using only a camera, illumination changes in indoor environments can cause localization failures during autonomous navigation. In this paper, we present a multi-session visual SLAM approach to create a map made of multiple variations of the same locations in different illumination conditions. The multi-session map can then be used at any hour of the day for improved localization capability. The approach presented is independent of the visual features used, and this is demonstrated by comparing localization performance between multi-session maps created using the RTAB-Map library with SURF, SIFT, BRIEF, FREAK, BRISK, KAZE, DAISY and SuperPoint visual features. The approach is tested on six mapping and six localization sessions recorded at 30 minutes intervals during sunset using a Google Tango phone in a real apartment.